{kind=link}
580 California St., Suite 400
San Francisco, CA, 94104

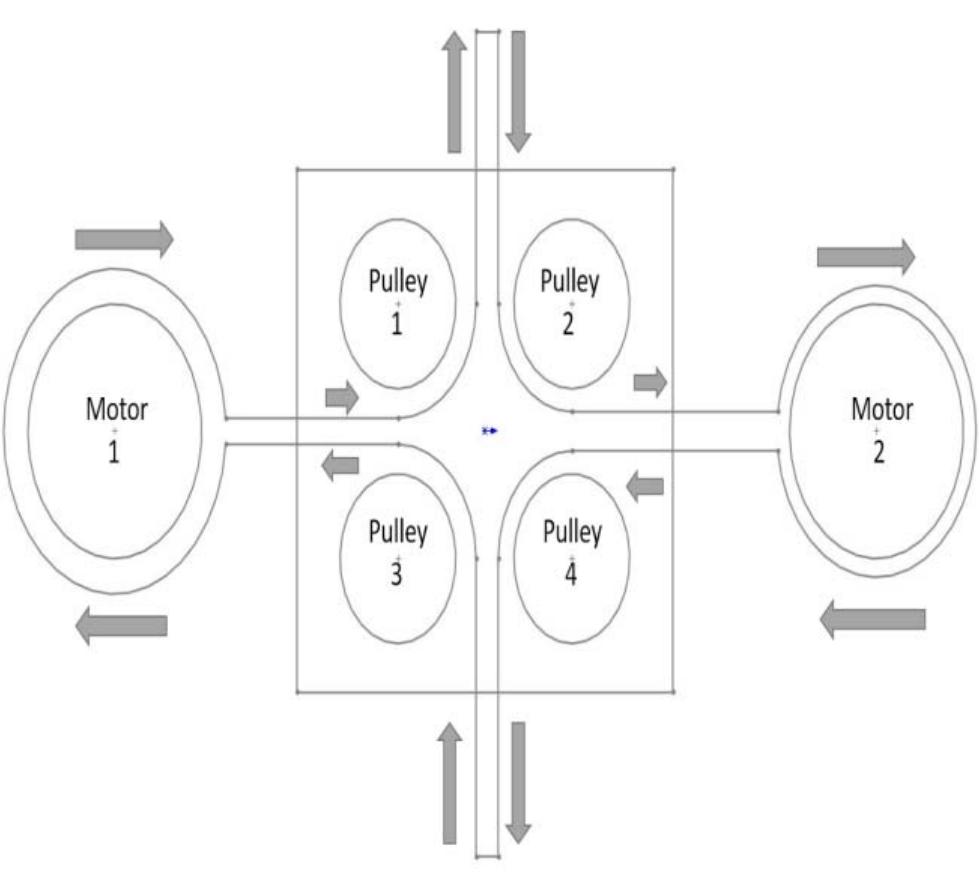
Figure 2 As we know the place (X-Y coordinates) where the dosa batter falls on pan, we use inverse kinematics to find the rotation of the motors so that the nozzle of the batter beaker (End effector) reaches there. This calculation is done is the software and the instructions are given to the microcontroller which in turn transfers data to CNC. Then CNC rotates the motors accordingly. But to move the beaker to the particular location motors are connected with a belt which moves as the motor rotates. Instead of just connecting belt to the motors we use four pulleys around which the belt travels. Through this construction we will be able to achieve two axis movement with just two stepper motors. This arrangement is shown in the Fig.2 and Fig.3 where beige colored parts are pulleys. Fig.2 Pulleys around which the belt travels.