{kind=link}
580 California St., Suite 400
San Francisco, CA, 94104

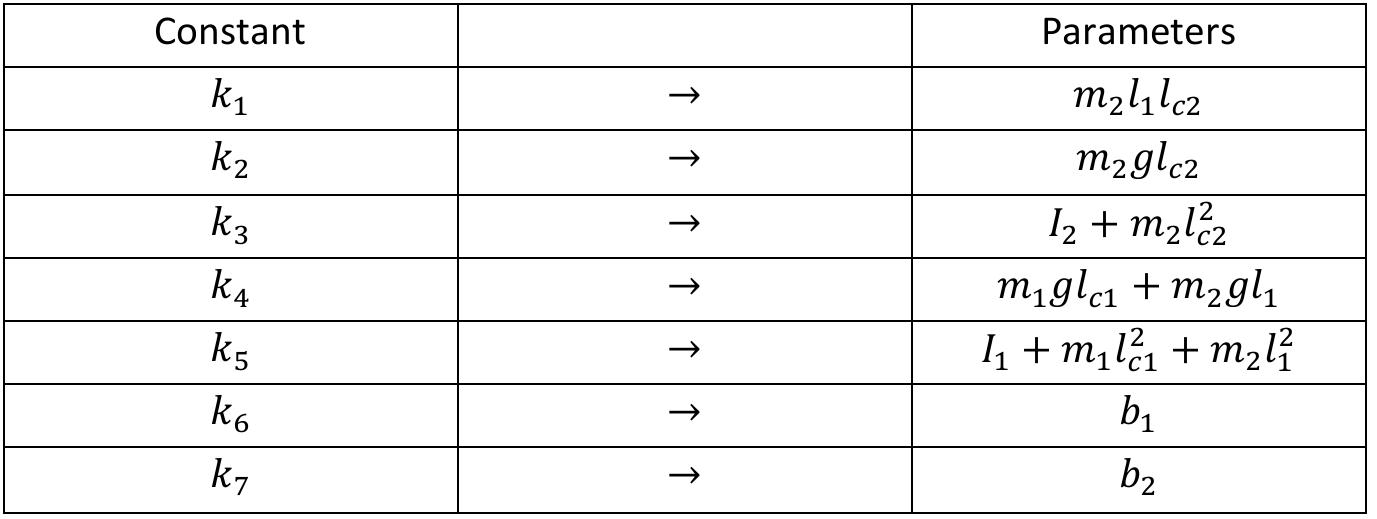
Table 3 2-DOF robotic manipulator parameters for cases 1 and 2. Both cases were simulated using the MATLAB-Simulink software and the .unge-Kutta solver to guarantee a good sampling of the signals obtained in the simu- ations. A sampling time of 0.0015 was selected. Figure 2 shows the results of the arameter convergence.