{kind=link}
580 California St., Suite 400
San Francisco, CA, 94104

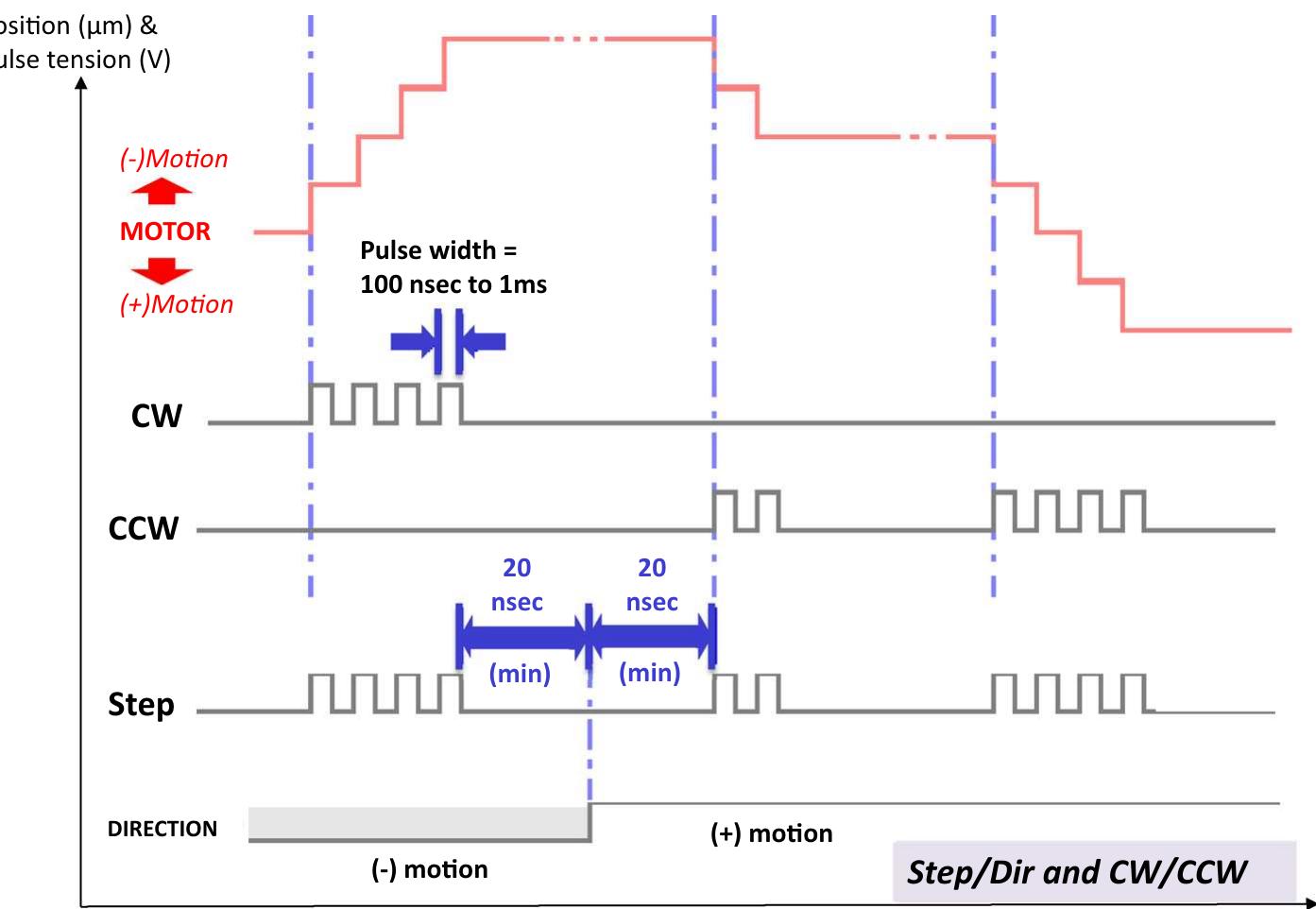
Figure 13 the active state of the control pulses with respect to the speeds obtainable by the reading of encoder values is therefore cali- brated the values of the constants by experimentally finding. For the printing movement: a = 0.1;b = 2;c = 1.04; f = were obtained for successive approximations of the param- eters present in the mathematical equations in order to fit as much as possible the curve obtained from the models with the original one. The mathematical model developed to bind