Energy and velocity-based multipath routing protocol for VANET
M. Bhagyavathi and V. Saritha*
SCOPE,
VIT University,
632014 - Vellore, India
Email: m.bhagyavathi@vit.ac.in
Email: vsaritha@vit.ac.in
*Corresponding author
Abstract
The VANET is a type of network that can be built randomly, quickly and temporarily without any standard infrastructure. In VANET, routing of data is an interesting and challenging task because of the high mobility. Therefore, the routing algorithm for VANETs is an imperative issue, particularly in vehicle to vehicle communication. This paper proposes a multipath routing algorithm for VANET named energy and velocity based multipath routing protocol (EVMRP) based on available bandwidth, residual energy and relative velocity. The most important point of the proposed algorithm is setting the CWmax as the available bandwidth of the path. The proposed algorithm is tested on the QoS parameters like end-to-end delay, throughput and packet loss. The results clearly indicate that the proposed algorithm, EVMRP outperforms when compared to the legacy systems like AOMDV.
Keywords: routing; vehicular ad hoc network; VANET; available bandwidth; multipath.
Reference to this paper should be made as follows: Bhagyavathi, M. and Saritha, V. (2019) ‘Energy and velocity-based multipath routing protocol for VANET’, Int. J. Advanced Intelligence Paradigms, Vol. 12, Nos. 3/4, pp.239-253.
Biographical notes: M. Bhagyavathi received her BTech in Computer Science and Engineering from Sree Vidyanikethan Engineering College, Tirupati, Andhra Pradesh, India and MTech in Computer Science and Engineering from VIT University, Vellore, India. She is currently with the School of Computing Science and Engineering, VIT University, Vellore, Tamilnadu, India. Her current research interests include wireless systems, MANET and VANET.
V. Saritha received her BTech in Electronics and Communication Engineering from Andhra University, Visakhapatnam, India, MTech in Computer Science and Engineering from VIT University, Vellore, India and PhD degree from VIT University, Vellore. She is currently working as Associate Professor at the School of Computing Science and Engineering,VIT University. She has several years of experience working in academia, research, teaching and academic administration. Her current research interests include VANET, mobile, wireless systems and databases.
1 Introduction
Vehicular ad hoc network (VANET) is a self-organised network formed by a group of mobile nodes, which are connected through wireless links. It plays a key role in intelligent transportation system (ITS) and is one of the areas where research has gained momentum in these years. VANETs using WLAN technology has recently gained attention in research. One of the critical problems to be solved is designing an algorithm for routing process that obeys scalable property and also are robust to the re-current path changes and path breakages caused due to the highly mobile nodes.
VANETs are utilised to establish short-extend rapid exchange of messages amid adjacent nodes and in between nodes and road side units (RSUs) (Barghi et al., 2009). The services for avoiding the collisions among nodes and communication of messages to warn the vehicles are made possible using vehicle-to-vehicle (V2V) communication. At present RSUs are turning into an essential component of VANET; they can possibly give new facilities, for example, web usage, marketing on wheels and driver information systems for nodes (Taleb et al., 2010). Systems based on infrastructure are further advanced than mobile adhoc networks (MANETs), or remote sensor systems (WSNs), to be utilised as a part of vehicle to vehicle communication. Remote LAN and dedicated short-range communication are included in the fundamental innovations related to vehicle-to-infrastructure (V2I) systems (Kiess et al., 2007; Benslimane et al., 2011). Designing an effective routing protocol which can transmit packets with less delay and less number of packet drops irrespective of the nodes high mobility and frequent modifications in the scenarios is a challenging task in VANET (Al-Sultan et al., 2014).
Greedy perimeter coordinator routing (Lochert et al., 2005), geographic source routing (Lochert et al., 2003) or connectivity-aware routing (Naumov and Gross, 2007) are some of the routing protocols in VANET that use only single path for transmission from the source to destination. Greedy perimeter stateless routing (GPSR) (Karp and Kung, 2000) handles every packet independently. Single-path and multipath have equivalent performance when the number of hops is very few amongst source and destination. As the distance (number of hops) between the source and destination increases, the route may not stable. In such cases, the difference between the single path and multipath can be clearly noticed. In case of high transmission rates and more number of hops between the source and destination, paths which are having distinct nodes give better results (Sermpezis et al., 2013).
Huge limitations of single path routing can be dazed off by multipath routing as it can deliver consistent transmission of information, uniform dissemination of load and information safety. Multipath routing provides multiple paths from sender to receiver. If one route disconnects, sender can choose other routes to deliver the packets or provides parallel transmission with multiple paths. There are certain parameters like packet delivery ratio, overhead, end-to-end delay, etc., are used to evaluate the performance of the multi-path routing protocols (Sha et al., 2013).
Multipath routing is categorised into two types: node-based routing and road-based routing (Nzouonta et al., 2009). The definite order of nodes form the path using which the transmission of packets takes place in the case of the former routing protocol. As the speed with which the nodes in VANET move is rapid, they move far from one another very quickly. The path failures occur frequently in the node-based routing as the relay nodes of the network move fast and go out of communication range of each other. The performance degrades in terms of packet delivery ratio because of recurrent path failures.
This leads to the increase of overhead because of the route recovery process being repeatedly used. The road is divided into sections in the case of road-based routing protocols. The performance of the system is enhanced in terms of reliability of paths in this case by forming the paths using the sections of the road from source to destination. The path stays connected until the traffic is high enough in every road section of the corresponding path. In the city environment, the traffic can be considered to be almost high when compared to the highway. Hence, the shifting of the road section do not take place frequently. So, road-based routing is best suitable to the city environment when compared to the node-based routing (Hsieh and Wang, 2012).
According to Wu et al. (2010), in this single path routing protocol, the most reliable path is determined by considering the details of the node mobility like the speed with which it is moving, the direction of movement, etc., Hence, the path determined might be more reliable but the fault tolerance levels are less when compared to the multipath routing. In the case of multipath routing, an alternate route which is pre-determined can be considered when the main path is failed.
The rest of the paper is organised as follows: Section 2 gives the related work which has been carried out in this area. In Section 3, the mobility model used for the testing purpose, the proposed algorithm and illustration of the proposed algorithm is presented. Section 4 presents the results and discussions are carried out. Finally, Section 5 concludes the paper.
2 Related work
Multiple paths which do not have loops and are node-disjoint are determined in any general multipath routing. According to Kiess et al. (2007), the multiple paths determined and are known to source are used for the transmission at the same time. Fast Restoration On-demand Multipath Routing (FROMR) protocol is proposed in Wu et al. (2010). In FROMR, single path is used for transmission and AODV protocol is used for determining the routes. The main focus of the protocol is to determine the alternate route as fast as possible. The region is clustered into grids of same size. A node which is anticipated to be in the grid for long time is elected as a leader in each grid. The overhead is distributed among the leaders of the grid as the tasks like determination of the paths, their maintenance and repair process is given to the leaders of the grid. The recovery of the paths is made fast by FROMR because of many junctures among multiple paths (Wu et al., 2010).
In ad-hoc on-demand multipath distance vector is proposed by Marina and Das (2001). AOMDV provides efficient fault tolerance due to which quicker and effective repairing of route failures is made possible. AOMDV determines multiple paths without loops and are link disjoint. In AOMDV each route request (RREQ) and route replay (RREP) which touch base at a node conceivably characterises an alternate way from source to destination. A direction metric (DM) fields will be added in RREQ packet as per defined mobility prediction method, which can to predict the link breakage (Marina and Das, 2001; Parissidis et al., 2006). Re-route detection is required when all paths to a particular destination started to fail. For throughput, link disjoint paths are managed, so that the paths fail individually one after another. Note that link disjoint paths are sufficient for our motivation, as we utilise multipath routing for dropping routing overheads instead of load balancing.
AODV protocol is modified to propose a multipath routing protocol in Yang and Sun (2011). In general, duplicate RREQ packets are discarded whereas in this protocol they are not discarded but instead maintained as a record in RREQ table. Maximum possible number of paths can be determined by making the destination respond to every RREQ packet it received with RREP packet along the same paths through which RREQ is received. RREQ table is used to determine the node disjoint paths. The AODV multipath routing protocol differs from AOMDV protocol in the way the node disjointness is accomplished.
A road-based multipath routing protocol for urban VANETs (RMRV) which is QoS-aware have the potential to discover various paths and wisely use them. In Hsieh and Wang (2012), a space-time planar graph technique is proposed to expect the link stability among road sections (RS) in a path to determine the time for which the path can last. The selection of the path which can last for long time by the source node helps in enhancing the performance of the network in terms of the packet delivery ratio and obtain QoS routing. Possible mulitple paths are determined amid source and destination based on their lifetime. The authors tried to reduce the overhead due to broadcast by maintaining the RS records in the RD packets received (Hsieh and Wang, 2012).
Junction-based multipath source routing (JMSR) is proposed in Sermpezis et al. (2013). The junctions on the road are considered in the determination of the paths. The nodes are expected to be spread around the junctions. The packets are allowed to transmit from the source to destination along the path formed using junctions.
In JMSR, every node in the path is made to know about the path along which the packets are being transmitted by infusing the information related to routing in every packet being transmitted. The junction nodes behave as eligible node to forward and the dispersal of packets is done by these nodes randomly. To enhance the performance of the network, multipath routing is considered such that the network load can be distributed to numerous routes. JMSR is a multipath routing protocol which is based on the junctions in place of nodes (Sermpezis et al., 2013).
A Congestion Adaptive Multipath Routing Protocol (CAMP) is proposed in Raviteja et al. (2012). Some of the reasons to reduce the packet delivery ratio, increase in delay and make the system to perform low when compared to its actual capacity are long congestion periods, continuous link discontents and hand-offs in VANETs. The system can be made to perform better by incorporating some kind of mechanism which can control congestion in the routing protocol also. In CAMP, the source node is intimated about the status of congestion such that the route which have less or no congestion can be used for transmission (Raviteja et al., 2012).
A multipath routing protocol is proposed by Lai et al. (2014) that is developed on geographic routing and significance. The crossing points of the road which can be used for transmitting the data or packets are selected and the affectability of the routes to node activities is lessened by determining the probability function of the network and collecting the data related to the flow of traffic instantaneously. Moreover, the information heaps are too refereed to support through convergence choices and keep away from congestion. Different methods of communication process is used to transmit the packet based on their priority. Various routes are used to achieve vigorous responses and enhance the trustworthiness. The main aim of this protocol is improve the packet delivery ratio and reduce delay.
Priority-based multi-path has critical performance change in comparison with other existing geographic routing protocols (Lai et al., 2014). More research is carried out in this field in Pandey et al. (2016), Singh et al. (2015), Subramaniam and Ramasamy (2014), Chang et al. (2014), Su et al. (2013), Karia and Godbole (2013), Lee et al. (2013), Farooq et al. (2015), Liu et al. (2016), Ayaida et al. (2014), Mostafa et al. (2014), Arun et al. (2015) and Mala et al. (2013). The contributions of the proposed work include:
The contributions of the proposed work include:
- to develop multipath routing algorithm for V2V communication and illustration of the algorithm
- firstly, paths are selected based on the residual energy of the nodes
- secondly, node disjoint paths only are considered
- finally the paths with nodes whose relative velocity is less among them are considered
- CWmax is set to the link capacity of the corresponding paths
- experimental assessment of the anticipated result.
As the path with high available bandwidth can be used to transmit more number of packets and the path with less bandwidth can be used to transmit only less number of packets the maximum congestion window size is set to the available bandwidth of the path in the proposed protocol. This way of fixing the maximum congestion window size to the available bandwidth of the path, the proposed protocol is avoiding the congestion and hence increases the packet delivery ratio. Our experimental results show that the proposed routing algorithm improves the packet delivery ratio and minimizes the end to end delay. The performance of the proposed algorithm, energy and velocity based multipath routing protocol (EVMRP) is compared with the existing routing protocol, AOMDV.
3 Energy and velocity based multipath routing protocol
3.1 Mobility model
Highway is the part that holds vehicles and manages their readiness to move and it represents a curve highway topology. Figure 1 shows a bi-directional highway with two lanes in each direction and a separating median. Since mobile vehicles are free to move as by chance, vehicle readiness to move is one of the most important issues in protocol design. Actually there are three ways of communication in VANET - V2V communication, V2I communication and hybrid (combination of both) communication. The proposed protocol, EVMRP is tested for the V2V communication using the mobility model given in Figure 1.
Figure 1 Mobility model (see online version for colours)

3.2 Algorithm
The traditional method, flooding can be used to determine all the possible paths from the source node ’ S ’ to the destination node ’ D '. As the work is being carried out in VANET, the nodes are not in scattered way, i.e., they are along the predefined roads. To determine the one hop neighbouring nodes of the source node in the destination direction, positions of the nodes are considered. The (X,Y) coordinates can be obtained using the GPS device installed in the nodes. Let (XS,YS) be coordinates of the source node, (XD,YD) be the coordinates of the destination node and (Xn,Yn) be the coordinates of the one hop neighbouring node. Then, if Xn lies between XS and XD and at the same time if Yn lies between YS and YD, then it is shown that the one hop neighbouring node is in the direction of the destination node ’ D '. Available bandwidth of each link is estimated and packet transmission time, residual energy of the nodes is computed. The energy required to transmit and receive a packet by a node is calculated (Lotfi et al., 2010). RTS packets are sent by the source node only to the neighbouring nodes determined as in the direction of destination node. These RTS packets are forwarded to the destination with/without intermediate forwarding nodes. The destination node in reply transmits the CTS packets to the source using the same paths. These are the entire possible multiple paths. The link capacity of the possible multiple paths is determined by considering the minimum link capacity among all the links in the path.
Assume that there are ’ n ’ links in the path ’ p '.
Let us represent the link capacity of each link as lc1,lc2,…,lcn.
Then the link capacity of the path ’ p ’ =min(l1,l2,…,ln).
The number of packets that can be transmitted or receive is computed using the link capacity of the path. Then the energy required to transmit or receive these packets is estimated (Lotfi et al., 2010) and the path with nodes that have the required energy levels only are considered for further process because if the nodes do not have sufficient energy then the path may break and there is a chance of packet drop or increase in delay. Among these selected paths, node disjoint paths are selected to take an advantage of making the link capacity to be the available bandwidth. The relative velocity among the nodes in the selected paths is determined and the paths in which the relative velocity among the nodes is low are chosen. This step is considered because if the nodes relative velocity is high
then the probability of the link breakage is high. Finally set the CWmax with the available bandwidth for the selected paths.
3.3 Illustration
Illustration is given how the paths are determined using the proposed algorithm from node ’ D ’ to node ’ Q '. The weight of the edge is the link capacity of the link in Mbps and the residual energy of each node is given at the node in mJ as shown in Figure 2.
Figure 2 Sample network (see online version for colours)

1 Determine the neighbouring nodes in the direction of destination.
Based on the GPS information to source node ’ D ', it determines that the nodes ’ I ', ’ G ’ and ’ H ’ are neighbouring nodes in the direction of destination node ’ Q '. So, RTS packets are transmitted only to these nodes which are forwarded to the destination.
2 Determine the link capacity of each link.
Given in Figure 2.
3 Packet transmission time is calculated.
Packet transmission time = packet size / bit rate
Bit rate =2Mbps
Packet size =1,000 bytes
Packet transmission time =(1,000×8)/(2×106 bits/s) =4,000μ s
4 Residual energy is calculated.
Given in Figure 2.
5 Required energy by each node (to transmit and receive) a packet =520 mA× voltage × transmission time.
Consider voltage =0.5v
Hence required energy =260∗10−3∗ transmission time
=0.26∗ transmission time =0.26∗4000μ s=0.26∗4000∗10−6=1040∗10−6=1.04 mJ
6 Determine possible multipath from source to destination using RTS/CTS mechanism Path1: D→I→P→R→Q
Path 2: D→I→J→P→R→Q
Path3: D→I→J→R→Q
Path 4: D→H→J→P→R→Q
Path5: D→H→J→R→Q
Path6: D→H→K→R→Q
Path7: D→H→K→J→P→R→Q
Path8: D→H→K→J→R→Q
Path9: D→H→K→N→Q
Path 10: D→H→K→M→N→Q
Path 11: D→H→K→M→O→Q
Path 12: D→G→K→J→P→R→Q
Path 13: D→G→K→J→R→Q
Path 14: D→G→K→R→Q
Path 15: D→G→K→N→R→Q
Path 16: D→G→K→N→Q
Path 17: D→G→K→M→N→R→Q
Path 18: D→G→K→M→N→Q
Path 19: D→G→K→M→O→Q
Path 20: D→H→K→N→R→Q
Path 21: D→H→K→M→N→R→Q
Path22: D→G→L→M→N→Q
Path23: D→G→ L→M→O→Q Path24: D→G→ L→M→ N→R→Q
7 Determine the link capacity of the paths: minimum capacity among all the links in the path is shown in Table 1.
Table 1 Link capacity of the paths
| Path1: 3 |
Path2: 2.5 |
Path3: 2.5 |
| Path4: 3 |
Path5: 3 |
Path6: 3 |
| Path7: 3 |
Path8: 3 |
Path9: 4 |
| Path10: 3 |
Path11: 3 |
Path12: 3 |
| Path13: 3 |
Path14: 3 |
Path15: 3 |
| Path16: 3 |
Path17: 3 |
Path18: 3 |
| Path19: 3 |
Path20: 3 |
Path21: 3 |
| Path22: 3 |
Path23: 3 |
Path24: 3 |
8 Determine the number of packets that can be transmitted at a time using each path and are shown for Figure 2 in Table 2.
Number of packets /s= bandwidth / packet size
Table 2 Number of packets that can be transmitted using various paths
| Path1:375 |
Path2: 312.5 |
Path3: 312.5 |
| Path4:375 |
Path5:375 |
Path6:375 |
| Path7:375 |
Path8:375 |
Path9: 500 |
| Path10:375 |
Path11:375 |
Path12:375 |
| Path13:375 |
Path14:375 |
Path15:375 |
| Path16:375 |
Path17:375 |
Path18:375 |
| Path19:375 |
Path20:375 |
Path21:375 |
| Path22:375 |
Path23:375 |
Path24:375 |
9 Energy required for each node in the path to transmit and receive the number of packets as given in step 8= number of packets × energy required per packet. Energy required for the sample network given in Figure 2 in Table 3.
Table 3 Energy required by each path
| Path1: 0.39 |
Path2: 0.32 |
Path3: 0.32 |
| Path4: 0.39 |
Path5: 0.39 |
Path6: 0.39 |
| Path7: 0.39 |
Path8: 0.39 |
Path9: 0.52 |
| Path10: 0.39 |
Path11: 0.39 |
Path12: 0.39 |
| Path13: 0.39 |
Path14: 0.39 |
Path15: 0.39 |
| Path16: 0.39 |
Path17: 0.39 |
Path18: 0.39 |
| Path19: 0.39 |
Path20: 0.39 |
Path21: 0.39 |
| Path22: 0.39 |
Path23: 0.39 |
Path24: 0.39 |
10 Selection of paths: paths in which all the nodes have required energy levels are selected
Path1: D→I→P→R→Q Path6: D→H→ K→R→Q Path 11: D→H→ K→M→O→Q Path 14: D→G→ K→R→Q Path 19: D→G→ K→M→O→Q Path23: D→G→ L→M→O→Q
11 Selection of node disjoint paths
Path1 and one of path11, path19 and path23 can be selected. Arbitrarily path11 is chosen
Path1: D→I→P→R→Q Path 11: D→H→ K→M→O→Q
12 Relative velocity of nodes is estimated and appropriate paths are selected
In this example the relative velocity of nodes in the selected paths is assumed to satisfactory.
13 Link capacity of the selected paths is estimated and CWmax is set to the corresponding value.
The CWmax of both the paths is set equal to their corresponding link capacity. i.e., 3 .
4 Results and discussion
The performance of the proposed algorithm is evaluated using the following QoS parameters:
- Packet delivery ratio: the ratio of number of the packets that are delivered successfully to the destination node to the number of packets that are transmitted by the source node.
Packet delivery ratio = Number of packets transmitted Number of packets successfully delivered
- End-to-end delay: the average time taken to deliver a packet to the destination. The time taken in the path discovery process and the queuing time is also included in end-to-end delay calculation.
End-to-end delay = Number of links Received time − Sent time
- Network throughput: the rate at which the packets are successfully delivered to the destination.
Network throughput = Packets transmission period Number of packets delivered
The proposed protocol is implemented and evaluated using network simulator NS-2 (2011) and mobility model generator for vehicular networks, MOVE (The MOVE Simulator, 2011). The mobility model is developed using simulation of urban mobile networks, SUMO (UDel Models for Simulation of Urban Mobile Wireless Networks, 2011). The algorithm is developed using NS-2 and both are integrated using MOVE tool. The values are considered as an average of 20 runs. The simulation parameters considered are shown in Table 4.
Table 4 Simulation parameters
| Parameter |
Value |
| Channel type |
Wireless channel |
| Radio-propagation model |
Two ray ground |
| Network interface type |
WirelessPhy |
| MAC type |
802_11 |
| Interface queue type |
Drop tail / priority queue |
| Link layer type |
LL |
| Antenna model |
Omni antenna |
| Topology |
800∗800 |
| Agent |
UDP |
| Packet size |
512 |
| Application |
CBR |
| CBR rate |
200kbps |
| Mobile nodes |
15 |
Figure 3 Comparison of AOMDV and EVMRP in terms of throughput

The two algorithms AOMDV and EVMRP are compared and the results for the comparison in terms of throughput is shown in Figure 3. The throughput of network is decreased with the vehicle node density increased, the performance of network has a consistent decline. Be that as it may, EVMRP performs better than AOMDV in throughput. The consideration of energy levels of the nodes, relative velocity of the nodes and the link capacity altogether helped in enhancing the overall performance of the EVMRP algorithm.
Figure 4 Comparison of AOMDV and EVMRP in terms of throughput and no. of nodes
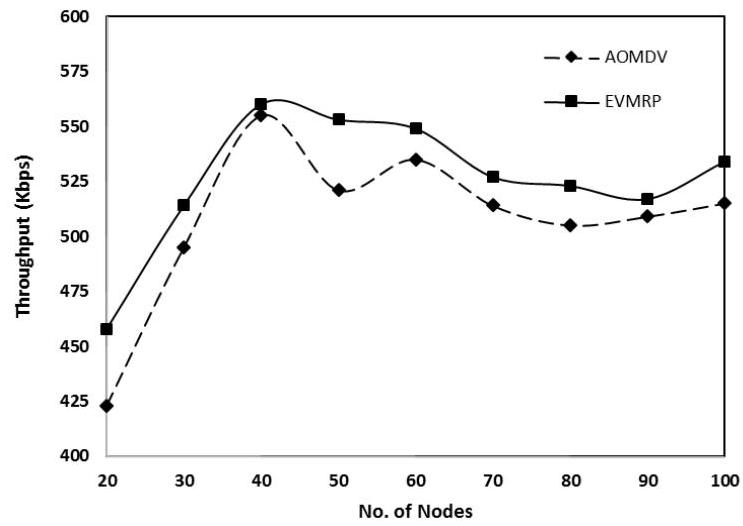
The comparison of the throughput for the two algorithms - AOMDV and EVMRP is shown in Figure 4. The throughput of network is decreased with the vehicle node density increased, the performance of network has a consistent decline. It can be observed that the throughput is less when no of nodes is increased in the proposed algorithm, EVMRP when compared to AOMDV.
Figure 5 Comparison of AOMDV and EVMRP in terms of delay

The comparison of the delay for the two algorithms - AOMDV and EVMRP is shown in Figure 5. It can be observed that the delay is less in the proposed algorithm, EVMRP when compared to AOMDV. The number of packets that can be transmitted or receive is computed using the link capacity of the path. Then the energy required to transmit or receive these packets is estimated and the path with nodes that have the required energy levels only are considered for further process because if the nodes do not have sufficient energy then the path may break and there is a chance of packet drop or increase in delay.
Figure 6 Comparison of AOMDV and EVMRP in terms of packet loss

The comparison of the packet loss for the two algorithms - AOMDV and EVMRP is shown in Figure 6. As the packets are transmitted based on the relative velocity of the nodes and the energy of the nodes, the probability of link breakage is less. The packet loss due to link breakage is reduced by considering the relative velocity of the nodes in the selection of paths and the packet loss due to node breakage is reduced by considering the energy of the nodes. There is another possibility of packet loss which is due to congestion. This loss is also reduced by considering the link capacity and fixing the CW size accordingly. Hence, these various factors helped in reducing the packet loss in EVMRP.
5 Conclusions
In VANET, routing of data is an interesting and challenging task because of the high mobility. Therefore, the routing algorithm for VANETs is an imperative issue, particularly in vehicle to vehicle communication. This paper proposed a multipath routing algorithm for VANET named EVMRP based on available bandwidth, residual energy and relative velocity. The maximum congestion window size is maintained to be not more than the link capacity which reduced the number of packet loss and enhance the throughput of the system. The proposed protocol is simulated under a more reasonable environment. The results projected makes clear that the proposed algorithm, EVMRP outflanks when compared with the legacy system, AOMDV.
References
Al-Sultan, S., Al-Doori, M.M., Al-Bayatti, A.H. and Zedan, H. (2014) ‘A comprehensive survey on vehicular ad hoc network’, Journal of Network and Computer Applications, January, Vol. 37, pp.380-392, ISSN: 1084-8045.
Arun, V. and Shunmuganathan, K.L. (2015) ‘Delivering QOS with security of encrypted tracer and checker model in MANET’, International Journal of Advanced Intelligence Paradigms, Vol. 7, Nos. 3-4, pp.342-351.
Ayaida, M., Barhoumi, M., Fouchal, H., Ghamri-Doudane, Y. and Afilal, L. (2014) ‘Joint routing and location-based service in VANETs’, Journal of Parallel and Distributed Computing, Vol. 74, No. 2, pp.2077-2087.
Barghi, S., Benslimane, A. and Assi, C. (2009) ‘A lifetime-based routing protocol for connecting VANETs to the internet’, WOWMOM, pp.1-9.
Benslimane, A., Barghi, S. and Assi, C. (2011) ‘An efficient routing protocol for connecting vehicular networks to the internet’, Pervasive and Mobile Computing, Vol. 7, No. 1, pp. 98−113.
Chang, J.M., Lai, C.F., Chao, H.C. and Zhu, R. (2014) ‘An energy-efficient geographic routing protocol design in vehicular ad-hoc network’, Computing, Vol. 96, No. 2, pp.119-131.
Farooq, W., Khan, M.A., Rehman, S. and Saqib, N.A. (2015) ‘A survey of multicast routing protocols for vehicular ad hoc networks’, International Journal of Distributed Sensor Networks, Article ID 923086, 12pp., doi:10.1155/2015/923086.
Hsieh, Y.L. and Wang, K. (2012) ‘A road-based QoS-aware multipath routing for urban vehicular ad hoc networks’, Global Communications Conference (GLOBECOM), 2012 IEEE, IEEE, December, pp.189-194.
Karia, D.C. and Godbole, V. (2013) ‘Mobility models and traffic pattern generation-based optimisation of reactive protocols’, International Journal of Intelligent Engineering Informatics, Vol. 2, No. 1, pp.30-46.
Karp, B. and Kung, H. (2000) ‘GPSR: greedy perimeter stateless routing for wireless networks’, Proc. 2000 ACM/IEEE International Conference on Mobile Computing and Networking.
Kiess, W., Rybicki, J. and Mauve, M. (2007) ‘On the nature of inter-vehicle communication’, 4th Workshop on Mobile Ad-Hoc Networks.
Lai, W.K., Tai, C.K., Wu, T.Y., Anpalagan, A. and Chen, J.Z. (2014) ‘PBMP: priority-based multi-path packet routing for vehicular ad hoc network system in city environment’, Transactions on Emerging Telecommunications Technologies, doi: 10.1002/ett. 290.
Lee, W.I., Pyun, J.Y., Lee, Y.S. and Lee, S.W. (2013) ‘Relative velocity based vehicle-to-vehicle routing protocol over ad-hoc networks’, International Journal of Ad Hoc and Ubiquitous Computing, Vol. 12, No. 1, pp.14-22.
Liu, J., Wan, J., Wang, Q., Deng, P., Zhou, K. and Qiao, Y. (2016) ‘A survey on position-based routing for vehicular ad hoc networks’, Telecommunication Systems, Vol. 62, No. 1, pp.15-30.
Lochert, C., Hartenstein, H., Tian, J., Fuessler, H., Hermann, D. and Mauve, M. (2003) ‘A routing strategy for vehicular ad hoc networks in city environments’, Proc. 2003 IEEE Intelligent Vehicles Symposium, pp.156-161.
Lochert, C., Mauve, M., F`ußler, H. and Hartenstein, H. (2005) ‘Geographic routing in city scenarios’, ACM SIGMOBILE Mobile Computing and Commun. Rev., January, Vol. 9, No. 1, pp.69-72.
Lotfi, M., Jabbehdari, S. and Shahmirzadi, M.A. (2010) ‘A new energy efficient routing algorithm based on a new cost function in wireless ad hoc networks’, Journal of Computing, June, Vol. 2, No. 6, pp.129-133, ISSN 2151-9617.
Mala, C., Gokul, A., Babu, A., Kalyanasundaram, R. and Rajagopalan, N. (2013) ‘Route discovery in cellular networks using soft computing techniques’, International Journal of Advanced Intelligence Paradigms, Vol. 5, Nos. 1-2, pp.45-58.
Marina, M.K. and Das, S.R. (2001) ‘On-demand multipath distance vector routing in ad hoc networks’, Ninth International Conference on Network Protocols 2001, IEEE, November, pp.14-23.
Mostafa, A., Vegni, A.M. and Agrawal, D.P. (2014) ‘A probabilistic routing by using multi-hop retransmission forecast with packet collision-aware constraints in vehicular networks’, Ad Hoc Networks, March, Vol. 14, pp.118-129, ISSN 1570-8705, http://dx.doi.org/10.1016.
Naumov, V. and Gross, T. (2007) ‘Connectivity-aware routing (CAR) in vehicular ad-hoc networks’, Proc. 2007 IEEE International Conference on Computer Communications, pp.1919-1927.
Nzouonta, J., Rajgure, N., Wang, G. and Borcea, C. (2009) ‘VANET routing on city roads using real-time vehicular traffic information’, IEEE Transactions on Vehicular Technology, Vol. 58, No. 7, pp.3609-3626.
Pandey, K., Raina, S.K. and Raw, R.S. (2016) ‘Distance and direction-based location aided multihop routing protocol for vehicular ad-hoc networks’, International Journal of Communication Networks and Distributed Systems, Vol. 16, No. 1, pp.71-98.
Parissidis, G., Lenders, V., May, M. and Plattner, B. (2006) ‘Multi-path routing protocols in wireless mobile ad hoc networks: a quantitative comparison’, Next Generation Teletraffic and Wired/Wireless Advanced Networking, Springer Berlin, Heidelberg, pp.313-326.
Raviteja, B.L., Annappa, B. and Tahiliani, M.P. (2012) ‘CAMP: congestion adaptive multipath routing protocol for VANETs’, Advanced Computing, Networking and Security, Springer Berlin, Heidelberg, pp.318-327.
Sermpezis, P., Koltsidas, G. and Pavlidou, F.N. (2013) ‘Investigating a junction-based multipath source routing algorithm for VANETs’, IEEE Communications Letters, Vol. 17, No. 3, pp.600-603.
Sha, K., Gehlot, J. and Greve, R. (2013) ‘Multipath routing techniques in wireless sensor networks: a survey’, Wireless Personal Communications, Vol. 70, No. 2, pp.807-829.
Singh, S.K., Duvvuru, R. and Singh, J.P. (2015) ‘TCP and UDP-based performance evaluation of proactive and reactive routing protocols using mobility models in MANETS’, International Journal of Information and Communication Technology, Vol. 7, No. 6, pp.632-644.
Su, S., Yu, H. and Wu, Z. (2013) ‘An efficient multi-objective evolutionary algorithm for energyaware QoS routing in wireless sensor network’, International Journal of Sensor Networks, Vol. 13, No. 4, pp.208-218.
Subramaniam, M. and Ramasamy, S. (2014) ‘A survey on performance analysis of energy aware multicast routing protocols in mobile ad hoc network’, International Journal of Networking and Virtual Organisations, Vol. 14, No. 4, pp.340-354.
Taleb, T., Benslimane, A. and Letaif, K.B. (2010) ‘Towards an effective risk-conscious and collaborative vehicular collision avoidance systems’, IEEE Transactions on Vehicular Technology, Vol. 59, No. 3, pp.1474-1486.
The MOVE Simulator (2011) [online] http://www.csie.ncku.edu.tw/ klan/move/index.htm (accessed 15 October 2015).
The Network Simulator NS-2 (2011) [online] http://www.isi.edu/nsnam/ns (accessed 15 October 2015).
UDel Models for Simulation of Urban Mobile Wireless Networks (2011) [online] http://udelmodels.eecis.udel.edu/ (accessed 15 October 2015).
Wu, C.S., Pang, A.C. and Hsu, C.S. (2010) ‘Design of fast restoration multipath routing in VANETs’, 2010 International Computer Symposium (ICS), IEEE, December, pp.73-78.
Yang, F. and Sun, B. (2011) ‘Ad hoc on-demand distance vector multipath routing protocol with path selection entropy’, 2011 International Conference on Consumer Electronics, Communications and Networks (CECNet), IEEE, April, pp.4715-4718.
 Vankadara Saritha
Vankadara Saritha