Gregory O'Hare
Gregory O'Hare
580 California St., Suite 400
San Francisco, CA, 94104
1999, Bar-Ilan Symposium on the Foundations of Artificial Intelligence: Bridging Theory and Practice (BISFAI)
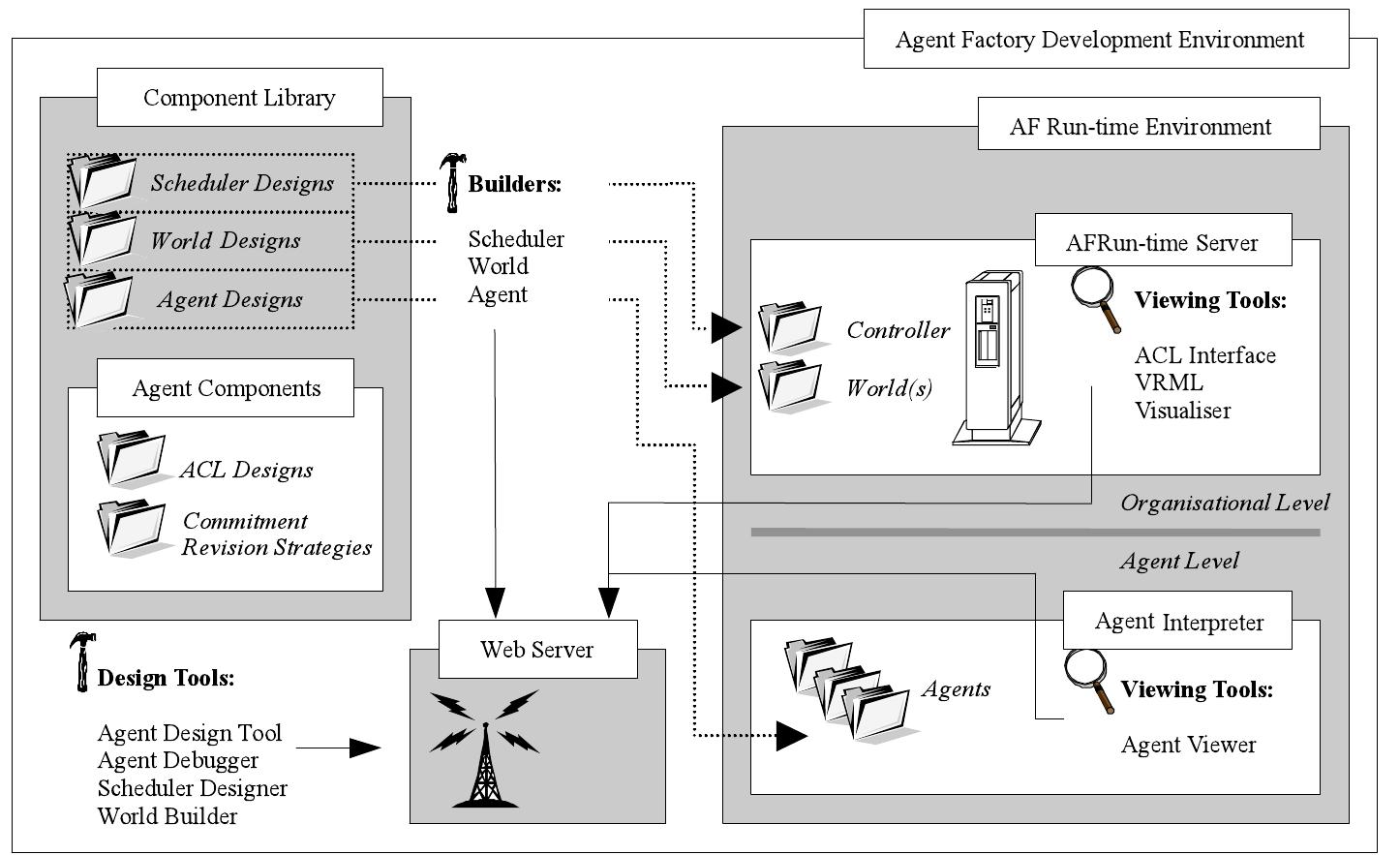
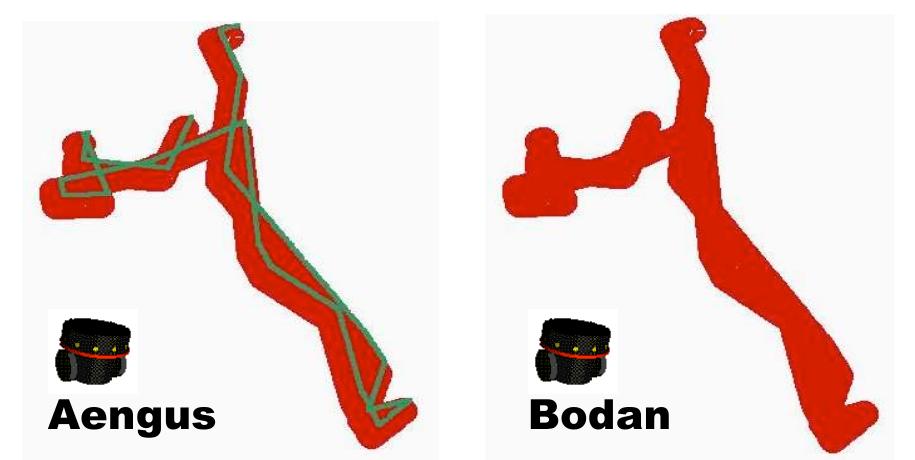
Abstract. This paper advocates the application of multi-agent techniques in the realisation of social robotic behaviour. We present the Social Robot Architecture, which integrates the key elements of agenthood and robotics in a coherent and systematic manner. This architecture seamlessly integrates real world robots, multi-agent development tools, and VRML visualisation tools into a coherent whole. Keywords: intelligent agents, robotics, agent communication languages, virtual reality