 Imran Allie
Imran Allie580 California St., Suite 400
San Francisco, CA, 94104
Academia.edu no longer supports Internet Explorer.
To browse Academia.edu and the wider internet faster and more securely, please take a few seconds to upgrade your browser.
2017
The pursuit of graphs which are vertex-transitive and non-Cayley on groups has been ongoing for some time. There has long been evidence to suggest that such graphs are a very rarety in occurrence. Much success has been had in this regard with various approaches being used. The aim of this thesis is to find such a class of graphs. We will take an algebraic approach. We will define Cayley graphs on loops, these loops necessarily not being groups. Specifically, we will define meta-Cayley graphs, which are vertex-transitive by construction. The loops in question are defined as the semidirect product of groups, one of the groups being Z2 consistently, the other being in the class of dihedral groups. In order to prove non-Cayleyness on groups, we will need to fully determine the automorphism groups of these graphs. Determining the automorphism groups is at the crux of the matter. Once these groups are determined, we may then apply Sabidussi’s theorem. The theorem states that a graph is Ca...
Filomat
In this paper, generalized Cayley graphs are studied. It is proved that every generalized Cayley graph of order 2p is a Cayley graph, where p is a prime. Special attention is given to generalized Cayley graphs on Abelian groups. It is proved that every generalized Cayley graph on an Abelian group with respect to an automorphism which acts as inversion is a Cayley graph if and only if the group is elementary Abelian 2-group, or its Sylow 2-subgroup is cyclic. Necessary and sufficient conditions for a generalized Cayley graph to be unworthy are given.
2014
An algebraic approach to graph theory can be useful in numerous ways. There is a relatively natural intersection between the fields of algebra and graph theory, specifically between group theory and graphs. Perhaps the most natural connection between group theory and graph theory lies in finding the automorphism group of a given graph. However, by studying the opposite connection, that is, finding a graph of a given group, we can define an extremely important family of vertex-transitive graphs. This paper explores the structure of these graphs and the ways in which we can use groups to explore their properties.
Bulletin of The Australian Mathematical Society, 2021
A graph Γ is called (G, s)-arc-transitive if G ≤ Aut(Γ) is transitive on the set of vertices of Γ and the set of s-arcs of Γ, where for an integer s ≥ 1 an s-arc of Γ is a sequence of s + 1 vertices (v 0 , v 1 ,. .. , v s) of Γ such that v i−1 and v i are adjacent for 1 ≤ i ≤ s and v i−1 = v i+1 for 1 ≤ i ≤ s− 1. Γ is called 2-transitive if it is (Aut(Γ), 2)-arc-transitive but not (Aut(Γ), 3)arc-transitive. A Cayley graph Γ of a group G is called normal if G is normal in Aut(Γ) and non-normal otherwise. It was proved by X. G. Fang, C. H. Li and M. Y. Xu that if Γ is a tetravalent 2-transitive Cayley graph of a finite simple group G, then either Γ is normal or G is one of the groups PSL 2 (11), M 11 , M 23 and A 11. However, it was unknown whether Γ is normal when G is one of these four groups. In the present paper we answer this question by proving that among these four groups only M 11 produces connected tetravalent 2-transitive non-normal Cayley graphs. We prove further that there are exactly two such graphs which are non-isomorphic and both determined in the paper. As a consequence, the automorphism group of any connected tetravalent 2-transitive Cayley graph of any finite simple group is determined.
Journal of Algebraic Combinatorics, 2020
In 1982, Babai and Godsil conjectured that almost all Cayley digraphs are digraphical regular representations. In 1998, Xu conjectured that almost all Cayley digraphs are normal [i.e., G L is a normal subgroup of the automorphism group of Cay(G, C)]. Finally, in 1994, Praeger and Mckay conjectured that almost all undirected vertextransitive graphs are Cayley graphs of groups. In this paper, first we present the variants of these conjectures for Cayley digraphs of monoids and we determine when the variant of Babai and Godsil's conjecture is equivalent to the variant of Xu's conjecture. Then, as a special consequence of our results, we conclude that Xu's conjecture is equivalent to Babai and Godsil's conjecture. On the other hand, we give affirmative answer to the variant of Praeger and Mckay's conjecture and we prove that a Cayley digraph of a monoid is vertex-transitive if and only if it is isomorphic to a Cayley digraph of a group. Finally, we use this characterization to give an affirmative answer to a question raised by Kelarev and Praeger about vertex-transitivity of Cayley digraphs of monoids. Also using this characterization, we explicitly determine the automorphism groups of vertex-transitive Cayley digraphs of monoids.
Discrete Mathematics, Algorithms and Applications, 2020
For a group [Formula: see text] and a subset [Formula: see text] of [Formula: see text] the bi-Cayley graph BCay[Formula: see text] of [Formula: see text] with respect to [Formula: see text] is the bipartite graph with vertex set [Formula: see text] and edge set [Formula: see text]. A bi-Cayley graph BCay[Formula: see text] is called a BCI-graph if for any bi-Cayley graph BCay[Formula: see text], [Formula: see text] implies that [Formula: see text] for some [Formula: see text] and [Formula: see text]. A group [Formula: see text] is called a [Formula: see text]-BCI-group if all bi-Cayley graphs of [Formula: see text] with valency at most [Formula: see text] are BCI-graphs. In this paper, we characterize the [Formula: see text]-BCI dihedral groups for [Formula: see text]. Also, we show that the dihedral group [Formula: see text] ([Formula: see text] is prime) is a [Formula: see text]-BCI-group.
Proyecciones (Antofagasta), 2021
Let G be a group and S be a subset of G such that e ∉ S and S−1 ⊆ S. Then Cay(G, S) is a simple undirected Cayley graph whose vertices are all elements of G and two vertices x and y are adjacent if and only if xy−1 ∈ S. The size of subset S is called the valency of Cay(G, S). In this paper, we determined the structure of all Cay(D2n, S), where D2n is a dihedral group of order 2n, n ≥ 3 and |S| = 1, 2 or 3.
Journal of the London Mathematical Society, 2002
Let G be a finite nonabelian simple group and let Γ be a connected undirected Cayley graph for G. The possible structures for the full automorphism group AutΓ are specified. Then, for certain finite simple groups G, a sufficient condition is given under which G is a normal subgroup of AutΓ. Finally, as an application of these results, several new half-transitive graphs are constructed. Some of these involve the sporadic simple groups G = J 1 , J 4 , Ly and BM, while others fall into two infinite families and involve the Ree simple groups and alternating groups. The two infinite families contain examples of half-transitive graphs of arbitrarily large valency.
Houston journal of mathematics
A. V. Kelarev and C. E. Praeger in [11] gave necessary and sufficient conditions for Cayley graphs of semigroups to be vertex-transitive. Also S. Fan and Y. Zeng in [4] gave a description of all vertex-transitive Cayley graphs of finite bands. In this paper we give similar descriptions for all vertex-transitive Cayley graphs of left groups. Also we extend some of the results to every direct product of a group and a band.
Journal of Combinatorics, 2016
This paper is dedicated to Adrian Bondy on the occasion of his seventieth birthday We investigate the existence of cycles of various lengths in connected Cayley graphs of valency at least 3 on generalized dihedral groups.
2021
A graph Γ is called (G, s)-arc-transitive if G ≤Aut(Γ) is transitive on the set of vertices of Γ and the set of s-arcs of Γ, where for an integer s ≥ 1 an s-arc of Γ is a sequence of s+1 vertices (v_0,v_1,…,v_s) of Γ such that v_i-1 and v_i are adjacent for 1 ≤ i ≤ s and v_i-1 v_i+1 for 1 ≤ i ≤ s-1. Γ is called 2-transitive if it is (Aut(Γ), 2)-arc-transitive but not (Aut(Γ), 3)-arc-transitive. A Cayley graph Γ of a group G is called normal if G is normal in Aut(Γ) and non-normal otherwise. It was proved by X. G. Fang, C. H. Li and M. Y. Xu that if Γ is a tetravalent 2-transitive Cayley graph of a finite simple group G, then either Γ is normal or G is one of the groups PSL_2(11), M_11, M_23 and A_11. However, it was unknown whether Γ is normal when G is one of these four groups. In the present paper we answer this question by proving that among these four groups only M_11 produces connected tetravalent 2-transitive non-normal Cayley graphs. We prove further that there are exactly tw...
by
Imran Allie
A thesis submitted in fulfillment of the requirements for the degree of Master of Science, in the
Department of Mathematics and Applied Mathematics
University of Western Cape
UNIVERSITY of the
WESTERN CAPE
Supervised by
Prof Eric Mwambene
January 2017
The pursuit of graphs which are vertex-transitive and non-Cayley on groups has been ongoing for some time. There has long been evidence to suggest that such graphs are a very rarety in occurrence. Much success has been had in this regard with various approaches being used. The aim of this thesis is to find such a class of graphs. We will take an algebraic approach. We will define Cayley graphs on loops, these loops necessarily not being groups. Specifically, we will define meta-Cayley graphs, which are vertex-transitive by construction. The loops in question are defined as the semidirect product of groups, one of the groups being Z2 consistently, the other being in the class of dihedral groups. In order to prove non-Cayleyness on groups, we will need to fully determine the automorphism groups of these graphs. Determining the automorphism groups is at the crux of the matter. Once these groups are determined, we may then apply Sabidussi’s theorem. The theorem states that a graph is Cayley on groups if and only if its automorphism group contains a subgroup which acts regularly on its vertex set.
I hereby declare that this thesis is my own work, that it has not been submitted for any degree or examination at any other academic institution, and that all the sources I have used or quoted have been indicated and acknowledged by complete references.

Imran Allie
January 2017
Signed:
I would like to thank: my parents, for their support and encouragement; my wife, for her love and respect; my supervisor, for his time and mentorship.
I would also like to thank the Chemicals Industries Education and Training Authority (CHIETA) and the Student Enrolment Management Unit (SEMU) for awarding and administering to myself a bursary for this Masters degree.
Most importantly, all thanks is due to Allah, who has granted me the blessings mentioned above, and also the ability to be thankful to them and to him.
1 Introduction … 6
2 Preliminaries … 8
2.1 Basic graph theory … 8
2.2 Basic algebraic definitions … 11
3 Graphs on groupoids … 14
3.1 Cayley graphs … 14
3.2 Quasi-associativity … 17
3.3 Meta-Cayley graphs … 20
4 Constructing graphs on dihedral groups … 24
4.1 Constructing loops … 24
4.2 Meta-Cayley subsets … 28
5 Automorphism groups and non-Cayleyness … 39
5.1 Sabidussi’s theorem … 39
5.2 The graphs Ω(n,r) … 41
5.3 The graphs Γ(n,r) … 43

UNIVERSITY of the WESTERN CAPE
Vertex-transitivity in graphs represents a measure of symmetry, which is defined by the graph having an automorphism group which acts transitively on the vertex set. Archetypal vertex-transitive graphs are those defined as Cayley graphs on groups.
While it can be proved, without difficulty, that all Cayley graphs on groups are vertex-transitive, the reverse implication does not hold. A counter example for the reverse implication is the well-known Petersen graph.
Through computational observations, it has been conjectured by Ivanov and Praeger [7] that
n→∞limvtr(n)cay(n)=1
where vtr(n) and cay(n) denote the number of isomorphism types of vertex-transitive and Cayley graphs on groups, respectively, with order at most n≥1. In other words, it is conjectured that the majority of vertex-transitive graphs are Cayley on groups. That is, the majority of vertex-transitive graphs can be represented by a group and a Cayley set. Much earlier, in [9] Marušič asked for which positive integers n does there exist a vertex-transitive graph on n vertices which is not Cayley on groups. It has been noted that there are indications that vertex-transitive graphs that are not Cayley on groups are a rarity in occurrence. Further, finding classes of graphs which are vertex-transitive and non-Cayley on groups has proved to be no simple matter. The determination of vertex-transitive graphs that are not Cayley on groups has thus raised a lot of attention. Notable success has been had in the construction
of such graphs; see, for instance, [2,6,8,10,11,18,20]. Much of the success had in this line has been in part due to Sabidussi’s theorem in [19]. The theorem states that a graph is Cayley on a group if and only if the automorphism group contains a subgroup which acts regularly on the vertex set.
The method of defining a Cayley graph on a group has been generalised to defining a Cayley graph on a groupoid in [13]. In fact, it was shown that every graph is representable on some groupoid. As mentioned, every Cayley graph on a group is vertex-transitive. However, to ensure vertex-transitivity of a Cayley graph on a groupoid, all we require is that the groupoid is a loop, and the Cayley set conforms to a property called quasi-associativity, a concept introduced by Gauyacq in [5].
In [16], meta-Cayley graphs were introduced. These graphs are vertex-transitive by construction. The construction involves the semi-direct product of two groups of which the twisting map satisfies a certain weak condition, such that the semi-direct product is a loop. Also, the Cayley set on the semi-direct product takes a particular form to ensure quasi-associativity. Of course this semi-direct product need not be a group. Thus, an avenue for the determination of vertex-transitive graphs which are non-Cayley on groups was introduced.
The purpose of this thesis is to define a class of meta-Cayley vertex-transitive graphs and then prove these graphs to be non-Cayley on groups. In Chapter 2, we present the necessary preliminaries relating to graph theory and groupoids. In Chapter 3 we explain how graphs are constructed on groupoids. Also, we present meta-Cayley graphs. In Chapter 4, we construct our vertex-transitive meta-Cayley graphs. In Chapter 5, we fully determine the automorphism groups of our constructed graphs and prove that they are non-Cayley on groups by applying Sabidussi’s theorem. Henceforth, we will refer to vertex-transitive graphs which are non-Cayley on groups by the acronym VTNCGs introduced by Watkins in [20].
In this chapter, we present the necessary preliminaries relating to graph and group theory. Naturally we begin with the formal definition of a graph. Thereafter, we define various concepts. At the crux of what we aim to achieve in this thesis is the determination of automorphism groups of graphs. Therefore, we define automorphisms on graphs which is also necessary in introducing the concept of vertex-transitivity. Also included are the definitions of certain algebraic structures, particularly groupoids and loops, as well as the semi-direct product of groups. We conclude the chapter with the definition of a class of graphs which we will consider in this thesis, that is, the generalised Petersen graphs.
Formally, graphs are defined as follows.
Definition 2.1. Let V be a non-empty set and E a relation on V. We call the pair Γ=(V,E) a digraph. If E is irreflexive and symmetric, we call the pair Γ=(V,E) a graph.
In a graph Γ=(V,E) the elements of V are called vertices and the elements of E are called edges. Edges are denoted as [x,y] where x,y∈V. We say that x and y are adjacent, x and y are incident, or that x and y are neighbours. Similarly, edges
can also be thought of as incident or adjacent if they share a common vertex. The degree or valency of a vertex is the number of edges incident with it. If the degree is the same for each vertex in the graph, then we refer to the degree of the graph.
We now define various types of sequences of vertices.
Definition 2.2. Let Γ=(V,E) be a graph.
(a) A walk is a sequence of vertices v0,v1,…,vk such that [vi,vi+1]∈E for every i∈{0,1,…,k−1}. k is called the length of the walk.
(b) A trail is a walk in which every edge is distinct.
© A path is a trail in which every vertex in {v0,v1,…,vk−1} is distinct.
(d) A cycle is a path in which vk=v0. An n-cycle is a cycle with n vertices.
Let Γ=(V,E) be a graph. Define a relation ∼ on V by x∼y if and only if there exists a path from x to y. If x∼y then x and y are said to be connected. It is not hard to see that ∼ is an equivalence relation. Each equivalence class [x] is called a component of the graph. If a graph has more than one component then it is disconnected, otherwise it is connected.
Graph homomorphisms can naturally be defined as mappings which preserve the relation on the vertex set. That is, graph homomorphisms are edge-preserving.
Definition 2.3. Let Γ and Λ be graphs. Let ϕ be a mapping, ϕ:V(Γ)⟶V(Λ).
(a) If [x,y]∈Γ implies [ϕ(x),ϕ(y)]∈Λ then ϕ is called a homomorphism. Γ and Λ are said to homomorphic.
(b) If ϕ is a bijective homomorphism and ϕ−1 is a homomorphism then ϕ is called an isomorphism. Γ and Λ are said to be isomorphic, denoted as Γ≅Λ.
© If ϕ is an isomorphism from a graph to itself then ϕ is called an automorphism.
Remark 2.4. The automorphisms of a graph Γ form a group under composition. The automorphism group is denoted as Aut Γ.
In this thesis, we will be proving isomorphic relations between graphs. We present the following lemma which will prove useful in this regard.
Lemma 2.5. Let Γ and Λ be graphs with finite vertex sets and let ϕ:V(Γ)⟶V(Λ) be a bijective homomorphism. If ∣E(Γ)∣=∣E(Λ)∣ then Γ≅Λ.
Proof. Let E(Γ)={e1,e2,…,ek}. Then ϕ(E(Γ))={ϕ(e1),ϕ(e2),…,ϕ(ek)}. For each i let ei=[xi,yi] so that ϕ(ei)=[ϕ(xi),ϕ(yi)]. Since ϕ is a bijection on the vertex sets, each ϕ(ei) is distinct. Therefore, ∣E(Λ)∣=∣E(Γ)∣=∣ϕ(E(Γ))∣ so that ϕ is onto with respect to edges. By the pigeonhole principle, ϕ−1 is a homomorphism so that ϕ is an isomorphism.
Remark 2.6. For automorphisms, the order of the edge sets are obviously the same. Thus we will not explicitly apply Lemma 2.5 when proving that certain maps are automorphisms.
Since the automorphisms form a group, we consider the action of this group on the set of vertices or edges. For any vertex x∈V and automorphism γ∈ Aut Γ we define the action of γ on x as γ(x). Similarly for an edge [x,y]∈E we define the action of γ on [x,y] as γ([x,y])=[γ(x),γ(y)]. If for any two vertices x,y∈V there exists an automorphism γ∈ Aut Γ such that γ(x)=y, then the group Aut Γ is said to act transitively on V. If for any two edges [x1,y1],[x2,y2]∈E there exists an automorphism γ∈ Aut Γ such that γ([x1,y1])=[x2,y2], then the group Aut Γ is said to act transitively on E. This leads us to the definition of vertex-transitivity and edge-transitivity.
Definition 2.7. Let Γ=(V,E) be a graph.
(a) If Aut Γ acts transitively on V(Γ) then Γ is said to be vertex-transitive.
(b) If Aut Γ acts transitively on E(Γ) then Γ is said to be edge-transitive.
© Let H be a subgroup of Aut Γ which acts transitively on V(Γ). If H has the same order as V(Γ) then H is said to act regularly on V(Γ).
We immediately note that if a graph is vertex-transitive then every vertex has the same degree. Also, every vertex is contained in the same amount of cycles of each size. For these reasons, we think of vertex-transitivity as a measure of symmetry within graphs.
Let Γ=(V,E) be a graph. Define a relation ∼ on V by x∼y if and only if there exists an automorphism γ∈ Aut Γ such that γ(x)=y. It is easy to see that ∼ is an
equivalence relation. The equivalence class containing a vertex x is called the orbit of x. If Γ is vertex-transitive then the orbit of any x∈V is V itself.
As we know, a group is a set paired with a binary operation which satisfies certain conditions. That is, a group contains an identity element, is closed under inverses, has full element-wise associativity and the binary operation is closed. Not every set paired with a binary operation satisfies these conditions. We present some definitions of structures which satisfy less than the conditions required for a group, beginning with the simplest version of a set paired with a closed binary operation.
Definition 2.8. Let A be a set and ⊕ be a closed binary operation on A. The pair (A,⊕) is called a groupoid.
Note that groupoids are often written as just A instead of (A,⊕).
For our purposes, we will require some structure. Loops, defined below, will suffice.
Definition 2.9. Let A be a groupoid. If for every a,b∈A there exists a unique x satisfying ax=b then we say that A is a left quasi-group. If for every a,b∈A there exists a unique y satisfying ya=b then we say that A is a right quasi-group. If A is both a left quasi-group and a right quasi-group then A is called a quasi-group.
Definition 2.10. Let A be a [left][right] quasi-group. If A has an identity element then A is called a [left][right] loop.
Every element in a loop has a unique right inverse and a unique left inverse. Due to the lack of associativity, these inverses are not necessarily the same. Let A be a loop with U⊆A,a∈A and e is the identity element. By a−1 we mean that aa−1=e. By U−1 we mean the set {u−1∈A:uu−1=e,u∈U}.
It is possible to combine two groups to form a product of groups. Naturally, for two groups G and H, this is done by taking G×H as the set of elements and defining the operation as (g1,h1)(g2,h2)=(g1g2,h1h2). This is known as the direct product of two groups, which itself is a group. We may also take what is called the semi-direct
product of two groups. This is similar to the direct product, except that it involves a mapping from G to Aut H.
Definition 2.11. Let G and H be groups. Let f:G⟶ Aut H be a mapping where f(x) is denoted as fx. The set G×H together with the binary operation defined by (g1,h1)(g2,h2)=(g1g2,h1fg1(h2)) is called a semi-direct product of G and H. The semi-direct product is denoted as G×fH.
Remark 2.12. The semi-direct product is not necessarily a group. However, it is easily shown that G×fH forms a group if f is a group homomorphism. The mapping f is often referred to as a “twisting” map.
A class of graphs which will be considered in this thesis, is the generalised Petersen graphs. As made clear by the name, these graphs are generalisations of the wellknown Petersen graph. They are defined as follows.
Definition 2.13. Let G(n,r) be a graph with vertex set
and edge set
E={[vi,vi+1],[ui,ui+r],[vi,ui]:i∈Zn}
where all subscripts are modulo n,r<n and r=0 if n is even. G(n,r) is called a generalised Petersen graph. The set of edges {[vi,vi+1]:i∈Zn} is called the outer rim, {[ui,ui+r]:i∈Zn} is called the inner rim, and edges in {[vi,ui]:i∈Zn} are called spokes.
Example 2.14. The graph presented in the figure below is the generalised Petersen graph G(8,3). The outer rim, inner rim and spokes are easily identifiable.
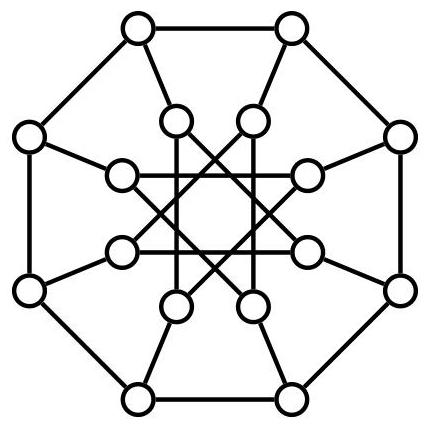
Figure 2.1: The generalised Petersen graph G(8,3).

In this Chapter, we present how graphs are defined on algebraic structures, most notably, groupoids. Furthermore, we present meta-Cayley graphs. The class of graphs which we will introduce in the next chapter will be of this type.
Graphs can be defined on various algebraic structures. Most commonly, graphs are defined on groups. In doing so, the vertices of the graph are naturally defined as the elements of the group. In order to define the irreflexive and symmetric relation, so that Definition 2.1 is satisfied, subsets of the group elements are chosen which satisfy certain conditions. These subsets are known as Cayley sets and are defined as follows.
Definition 3.1. Let G be a group and let 1G be the identity element of G. Let S⊂G. If
(i) 1G∈/S and
(ii) s∈S implies s−1∈S,
then S is called a Cayley set on G.
Now let G be a group and S a Cayley set on G. We define a relation E on G by (x,y)∈E if and only if y=xs where s∈S. We then have ys−1=x so that (y,x)∈E since s−1∈S. Therefore E is symmetric. Also, since 1G∈/S it is impossible that x=xs for some s∈S. Therefore (x,x)∈/E and E is irreflexive. This brings us to the following definition of a Cayley graph.
Definition 3.2. Let G be a group and S a Cayley set on G. The graph Γ consisting of the vertex set
V(Γ)=G
and edge set
E(Γ)={[x,xs]:x∈G,s∈S}
is called a Cayley graph on G and is denoted as Cay(G,S).
Example 3.3. Consider the symmetric group S3.U={(12),(123),(132)} is a Cayley set on S3 since it is closed under inverses and does not contain the identity element. The Cayley graph Cay(S3,U) is below.

It is easy to verify that the edges drawn above correspond exactly to the set E= {[x,xs]:x∈S3,s∈U}.
In Gauyacq [5] the notion of Cayley graphs on groups was generalised to loop structures and in [13] it was generalised to groupoids. In [13] it was in fact shown
that every graph can be represented as a Cayley graph on a groupoid. This brings us to the following definitions.
Definition 3.4. Let A be a groupoid and let S⊂A. If
(i) a∈/aS for any a∈A and
(ii) a∈(as)S for any a∈A and s∈S,
then S is called a Cayley set on A.
We note that if A is a group then the conditions in Definition 3.4 coincide with the conditions in Definition 3.1.
Now let A be a groupoid and S a Cayley set on A. Let us verify the required irreflexive and symmetric relation E. Just as with groups, we define E on A by (x,y)∈E if and only if y=xs where s∈S. If (x,y)∈E then y=xs for some s∈S, and we also have that x=(xs)s′ for some s′∈S. Therefore ys′=(xs)s′=x so that (y,x)∈E and E is symmetric. It is also clear that E is irreflexive since x∈/xS.
Naturally, Cayley graphs on groupoids are defined exactly as Cayley graphs on groups. Formally it is as follows.
UNIVERSITY of the
Definition 3.5. Let A be a groupoid and S a Cayley set on A. The graph Γ consisting of the vertex set
V(Γ)=A
and edge set
E(Γ)={[a,as]:a∈A,s∈S}
is called a Cayley graph on A and is denoted as Cay(A,S).
In the literature, it is generally not explicitly stated that a Cayley graph is Cayley on a group. If a graph is refered to as Cayley, it is assumed to mean Cayley on a group. However, since we will be dealing with Cayley graphs on loops, we will be explicit in refering to Cayley graphs on groups.
As alluded to previously, graphs which are Cayley on a group have been proven to be vertex-transitive, but the reverse implication does not hold. However, it has been shown that for a Cayley graph on a groupoid Cay(A,S), all the structure that is required for vertex-transitivity is that A is a quasi-group and S conforms to a certain type of weak associativity called quasi-associativity. This notion of quasi-associative subsets was first introduced by Gauyacq in [5] who termed them right associative. As elsewhere [13,14,15,16], we will continue to call them quasi-associative.
Definition 3.6. Let A be a groupoid and S a subset of A. If for all x,y∈A we have that
x(yS)=(xy)S
then S is called a quasi-associative subset of A.
Proposition 3.7. [15] Let A be a quasi-group and S a quasi-associative Cayley set on A. Then the graph Γ=Cay(A,S) is vertex-transitive.
Proof. For each a∈A we denote by λa∈A⟶A the left translation
λa(x)=ax
for any x∈A. Since A is a quasi-group, each ax is unique in A for a given a∈A and any x∈A. Therefore, λa is a permutation of V(Γ).
Every edge in Γ is of the form [x,xs] for some x∈A and some s∈S. Taking λa of [x,xs] we get
λa([x,xs])=[λa(x),λa(xs)]=[ax,a(xs)]=[ax,(ax)s′]
for some s′∈S. Thus λa is edge-preserving and λa∈AutCay(A,S).
Now let x,y∈V(Γ). Since A admits left cancellation, there exists a unique a such that ax=y. Therefore, for any x,y∈V(Γ), there exists some λa∈AutCay(A,S) such that λa(x)=y so that Aut Γ acts transitively on V(Γ). Therefore, Γ= Cay(A,S) is vertex-transitive.
Remark 3.8. If A is a group then the set of left translations forms a group under composition. This is an application of Cayley’s theorem. The set of left translations
has the same order as the set of vertices. Thus if A is a group, then the set of left translations acts regularly on the set of vertices.
Graphs which can be represented by a quasi-group and a quasi-associative Cayley set are called quasi-Cayley graphs.
The following is an example of a graph defined on a groupoid, which in fact turns out to be a loop, with a quasi-associative Cayley set.
Example 3.9. [15] Let n and r be integers such that (n,r)=1 with r2≡±1 (modn). Consider the set M(n,r)=Z2×Zn paired with the binary operation defined by (x,y)(x′,y′)=(x+x′,y+rxy′) where r is read as modulo n. It is clear that (0,0) is the identity of M(n,r). Suppose that (x,y)(x′,y′)=(x,y)(x′′,y′′). This implies that
(x+x′,y+rxy′)=(x+x′′,y+rxy′′)⇒x+x′=x+x′′ and y+rxy′=y+rxy′′⇒x′=x′′ and rxy′=rxy′′⇒(x′,y′)=(x′′,y′′)
Suppose also that (x′,y′)(x,y)=(x′′,y′′)(x,y). This implies that
(x′+x,y′+rx′y)=(x′′+x,y′′+rx′′y)⇒x′+x=x′′+x and y′+rx′y=y′′+rx′′y⇒x′=x′′ and y′=y′′⇒(x′,y′)=(x′′,y′′)
Therefore, M(n,r)=Z2×Zn is a loop.
Consider the set S={(0,1),(0,−1),(1,0)}⊂M(n,r). For any (x,y)∈M(n,r) we have (x,y)S={(x,y+rx),(x,y−rx),(x+1,y)} so that (x,y)s=(x,y) for any s∈S. We also have that
((x,y)(0,1))(0,−1)((x,y)(0,−1))(0,1)((x,y)(1,0))(1,0)=(x,y)=(x,y), and =(x,y)
so that (x,y)∈((x,y)s)S for any s∈S. Therefore S is a Cayley set on M(n,r).
For any (x,y),(x′,y′)∈M(n,r) we have
((x,y)(x′,y′))S={(x+x′,y+rxy′)(0,1),(x+x′,y+rxy′)(0,−1),(x+x′,y+rxy′)(1,0)}={(x+x′,y+rxy′+rx+x′),(x+x′,y+rxy′−rx+x′),(x+x′+1,y+rxy′)}
and
(x,y)((x′,y′)S)={(x,y)((x′,y′)(0,1)),(x,y)((x′,y′)(0,−1)),(x,y)((x′,y′)(1,0))}={(x,y)(x′,y′+rx′),(x,y)(x′,y′−rx′),(x,y)(x′+1,y′)}={(x+x′,y+rx(y′+rx′)),(x+x′,y+rx(y′−rx′)),(x+x′+1,y+rxy′)}={(x+x′,y+rxy′+rxrx′),(x+x′,y+rxy′−rxrx′),(x+x′+1,y+rxy′)}
so that S is quasi-associative if {rxrx′,−rxrx′}={rx+x′,−rx+x′}, which is true since r2≡±1.
The graph Cay(M(n,r),S) is defined on a loop with a quasi-associative Cayley set so that it is quasi-Cayley and vertex-transitive.
As it turns out, the class of graphs referred to in Example 3.9 is in fact isomorphic to the generalised Petersen graphs.
Proposition 3.10. [15] Let M(n,r) and S be as in Example 3.9. Then Cay(M(n,r), S)≅G(n,r).
Proof. Define a mapping ϕ:V(G(n,r))⟶V(Cay(M(n,r),S)) by
vi↦(0,i) and ui↦(1,i)
Clearly ϕ is a bijection.
We also have the following
ϕ([vi,vi+1])ϕ([ui,ui+r])=[((0,i),(0,i+1)]=[(0,i),(0,i)(0,1)]=[((1,i),(1,i+r)]=[(1,i),(1,i)(0,1)]
ϕ([vi,ui])=[((0,i),(1,i)]=[(0,i),(0,i)(1,0)]
so that ϕ is a bijective homomorphism.
It is clear that ∣E(Cay(M(n,r),S))∣=∣E(G(n,r))∣ since both graphs have the same degree. Therefore, by Lemma 2.5ϕ is an isomorphism.
As mentioned previously, every graph is a Cayley graph on some groupoid. In [14] it was shown that every vertex-transitive graph is a Cayley graph on a left loop with respect to a quasi-associative Cayley set. In view of this, the determination of VTNCGs translates to finding Cayley graphs on left loops with respect to quasiassociative Cayley sets which cannot be represented as Cayley graphs on groups. For our purposes, we then desire to find a suitable loop on which we can construct our vertex-transitive graphs.
Alspach and Parsons introduced a class of vertex-transitive graphs called metacirculant graphs in [2]. This class of graphs contains many VTNCGs. They are defined on the direct product of two cyclic groups, with the definition of edges involving some interaction between the groups which resembles the twisting used in defining semi-direct products of groups. These graphs were first shown to be quasi-Cayley by Gauyacq in [5]. In [16] they were generalised from cyclic groups to general groups.
It is a well-known result that if the twisting map in the semi-direct product of groups is a group homomorphism, then the semi-direct product is a group itself. For the semi-direct product to be a loop, much less structure is required for the twisting map. Left and right cancellability are maintained without any condition on the twisting map. For the existence of an identity element the twisting map need only satisfy a weak condition. That is, that the twisting map maps the identity element in the first group to the identity map of the second group. In the generalisation of metacirculant graphs from cyclic groups to general groups, only this key characteristic of the twisting map was maintained. The resultant graphs of this generalised construction are called meta-Cayley graphs. Meta-Cayley graphs will be suitable for our purposes.
Before we can present the definition of meta-Cayley graphs, it is necessary for us to first present some propositions and lemmas. The following proposition shows that the semi-direct product of two groups with a twisting map that satisfies the weak condition mentioned previously is indeed a loop.
Proposition 3.11. ([16]) Let A and A′ be groups. Let Q=A×fA′ be the semi-direct product of A and A′ such that f(e) is the identity map on A′, where e is the identity element of A. Then Q is a loop.
Proof. Let (a,a′),(b,b′)∈Q. Since A and A′ are groups, there exists unique x and x′ such that ax=b and a′x′=b′. Also, since fa is an automorphism of A′, there exists a unique x′′ such that fa(x′′)=x′. Therefore, there exists a unique (x,x′′) such that (a,a′)(x,x′′)=(b,b′) so that Q is a left quasi-group.
Since A and A′ are groups, there exists unique y and y′ such that ya=b and y′fy(a′)=b′. Therefore, there exists a unique (y,y′) such that (y,y′)(a,a′)=(b,b′) so that Q is a right quasi-group.
Furthermore, let e and e′ be the identity elements of A and A′ respectively. Then (x,y)(e,e′)=(xe,yfx(e′))=(xe,ye′)=(x,y) and (e,e′)(x,y)=(ex,e′fe(y))= (ex,e′y)=(x,y) so that (e,e′) is the identity. Therefore, Q=A×fA′ is a loop.
Now that we know we can sufficiently find a loop by taking the semi-direct product of two groups as above, the crux of the matter with regards to constructing metaCayley graphs is the determination of quasi-associative Cayley sets. Before we show how we determine these meta-Cayley sets, we first need the following lemmas.
Lemma 3.12. Let A be a loop and let U1,U2,…,Uk be quasi-associative subsets of A. Then U:=⋃Ui is quasi-associative in A.
Proof. Let a,b∈A and let s∈U so that s∈Ui for some i. Then a(bs)=(ab)s′ where s′∈Ui. Therefore s′∈U and U is quasi-associative in A.
Lemma 3.13. [16] Let A be a loop with an identity element e, and U a quasiassociative subset of A such that e∈/U. Then U is Cayley if U−1⊆U.
Proof. Let U be a quasi-associative subset of A with e∈/U and U−1⊆U. It is clear that a∈/aU for any a∈A. For any a∈A and u∈U, we have that a=ae=a(uu−1)=(au)u′ for some u′∈U. Therefore, a∈(au)U for any a∈A
and u∈U. Therefore, U is Cayley.
Proposition 3.14. ([16]) Let A and A′ be groups and Q be as in Proposition 3.11. For each x∈A, let Lx be a (possibly empty) subset of A′ such that
(a) e′∈/Le where e and e′ are the identity elements of A and A′ respectively;
(b) Lx−1=fx−1[Lx−1] for any x∈A;
© fafb[Lx]=fab[Lx] for any a,b∈A.
Let U be the subset of Q defined by
U:=x∈A⋃({x}×Lx)
Then U is a quasi-associative Cayley set on Q.
Proof. Since A and A′ are groups, both {x} and Lx are trivially quasi-associative in A and A′ respectively for all x∈A. Let (a,b),(a′,b′)∈Q and (x,s)∈{x}×Lx for some x∈A. Then
(a,b)((a′,b′)(x,s)) WEST =(a,b)(a′x,b′fa′(s))=(aa′x,bfa(b′fa′(s)))=(aa′x,bfa(b′)fa(fa′(s)))=(aa′x,bfa(b′)faa′(s′))=(aa′,bfa(b′))(x,s′)=((a,b)(a′,b′))(x,s′)
for some (x,s′)∈{x}×Lx. Therefore, {x}×Lx is quasi-associative in Q. By Lemma 3.12,U is quasi-associative in Q.
Clearly, (e,e′)∈/U. In view of Lemma 3.13, it is enough to show that U−1⊆U. For each x∈A, consider the set Ux=({x}×Lx)∪({x−1}×Lx−1). We have
({x}×Lx)−1=({x−1}×fx−1[Lx−1])=({x−1}×Lx−1)
and
({x−1}×Lx−1)−1=({x}×fx−1−1[Lx−1−1])=({x}×Lx)
Hence Ux=Ux−1 for any x∈A. It is also easy to see that
x∈A⋃Ux=U
Therefore U=U−1 and by Lemma 3.13, U is Cayley.
With Q and U as above, the resultant graph Cay(Q,U) is then necessarily vertextransitive. This brings us to the definition of meta-Cayley graphs.
Definition 3.15. Let A and A′ be groups. Let Q=A×fA′ be the semi-direct product of A and A′ such that f(e) is the identity map on A′, where e is the identity element of A. For each x∈A, let Lx be a (possibly empty) subset of A′ such that
(a) e′∈/Le where e and e′ are the identity elements of A and A′ respectively;
(b) Lx−1=fx−1[Lx−1] for any x∈A;
© fafb[Lx]=fab[Lx] for any a,b∈A.
Let U be the subset of Q defined by
U≅⋃({x}×Lx)
We call U a meta-Cayley subset of Q and the graph Cay(Q,U) is called a meta-Cayley graph.
In this chapter, we will be constructing our meta-Cayley graphs on loops. In [16] the generalised Petersen graphs were represented as graphs on the loop (Z2×Zn,⊕) (see Example 3.9 and Proposition 3.10). Here, we will consider the dihedral groups Dn in place of Zn. We will then consider the meta-Cayley graphs on these loop.
UNIVERSITY of the
WESTERN CAPE
In view of Proposition 3.14 the loop we will consider is the case of A=Z2 and A′=Dn. To facilitate our discussion, we will represent the dihedral group Dn as the semi-direct product of Z2 and Zn. That is, Dn as Z2×gZn where g:Z2→ Aut Zn defined by gx(y)=(−1)xy. It is easily shown that gx∈ Aut Zn. This representation will make it easier to present the loop operation. We present the following proof that this is admissable.
Proposition 4.1. Let Q=Z2×gZn where g:Z2→ Aut Zn defined by gx(y)= (−1)xy. Then Q is isomorphic to the dihedral group Dn.
Proof. Let ϕ:Q⟶Dn be a mapping defined by
ϕ:(0,i)↦Ri and ϕ:(1,i)↦Si
where Ri and Si represent rotations and reflections in Dn respectively. It is clear that ϕ is a bijection.
We require that the groupoid operation is preserved. There are four cases to consider:
(i) ϕ((0,i)(0,j))=ϕ((0,i+j))=Ri+j=RiRj=ϕ((0,i))ϕ((0,j))
(ii) ϕ((0,i)(1,j))=ϕ((1,i+j))=Si+j=RiSj=ϕ((0,i))ϕ((1,j))
(iii) ϕ((1,i)(0,j))=ϕ((1,i−j))=Si−j=SiRj=ϕ((1,i))ϕ((0,j))
(iv) ϕ((1,i)(1,j))=ϕ((0,i−j))=Ri−j=SiSj=ϕ((1,i))ϕ((1,j))
Therefore ϕ is an isomorphism and Q≅Dn.
In view of Proposition 4.1 and Proposition 3.14, we will consider the case of A=Z2 and A′=Z2×gZn. Taking the semi-direct product of these two groups we have Z2×f(Z2×gZn).
As we can see, we have to deal with two twisting maps: g to define dihedral groups on the set Z2×Zn and f to define loops. At this point, we are yet to define f:Z2⟶ Aut Z2×gZn. Note that any automorphism of Z2×gZn will respect the first co-ordinate since any automorphism on Dn preserves both the set of reflections and rotations (see [12]). We now define f by fx(y,z)=(y,rxz) where r∈Zn such that (n,r)=1 and prove that this mapping suffices as an automorphism of Z2×gZn.
Proposition 4.2. Let r∈Zn such that (n,r)=1. Let fx:Z2×gZn⟶Z2×gZn be a mapping defined by fx(y,z)=(y,rxz) where x∈Z2. Then f is an automorphism.
Proof. Since (n,r)=1 it is clear that f is onto. fx is thus a bijection.
Now,
fx((y,z)(y′,z′))=fx((y+y′,z+(−1)yz′))=(y+y′,rx(z+(−1)yz′))=(y+y′,rxz+rx(−1)yz′)=(y,rxz)(y′,rxz′)
=fx((y,z))fx((y′,z′))
Therefore fx is an automorphism.
Our groupoid is therefore fully defined as Q(n,r)=Z2×f(Z2×gZn) with r∈Zn, (n,r)=1 and the binary operation defined by
(x,(y,z))(x′,(y′,z′))=(x+x′,(y,z)fx(y′,z′))=(x+x′,(y,z)(y′,rxz′))=(x+x′,(y+y′,z+gy(rxz′)))=(x+x′,(y+y′,z+(−1)yrxz′))
with addition modulo 2 in the first and second co-ordinate and modulo n in the third co-ordinate. Henceforth we will not explicitly state this. For brevity, we denote (x,(y,z)) as (x,y,z).
As mentioned, we require that our groupoid is in fact a loop. We apply Proposition 3.11 in the specific context of our groupoid Q(n,r). We also go further and identify the identity element.
Proposition 4.3. Let r∈Zn such that (n,r)=1. Let Q(n,r)=Z2×f(Z2×gZn) with binary operation defined by (x,y,z)(x′,y′,z′)=(x+x′,y+y′,z+(−1)yrx(z′)). Then Q(n,r) is a loop with (0,0,0) as the identity element.
Proof. We have that
f0(y,z)=(y,r0z)=(y,z)
so that f0 is the identity map on Z2×gZn. By Proposition 3.11, Q(n,r) is a loop.
For any (x,y,z)∈Q(n,r), we have
(x,y,z)(0,0,0)=(x+0,y+0,z+(−1)yrx(0))=(x,y,z)
and
(0,0,0)(x,y,z)=(0+x,0+y,0+(−1)0r0(z))=(x,y,z)
Therefore, (0,0,0) as the identity element.
Even with this weak twisting map f, it may happen that Q(n,r) is a group, and not merely just a loop. In pursuit of VTNCGs, it is not beneficial to consider cases where Q(n,r) is a group since graphs on Q(n,r) would be by definition Cayley on groups. Therefore, before we determine possible and suitable meta-Cayley subsets, we need to characterise the conditions under which Q(n,r) is a group.
Proposition 4.4. Let r∈Zn such that (n,r)=1. Let Q(n,r)=Z2×f(Z2×gZn) with binary operation defined by (x,y,z)(x′,y′,z′)=(x+x′,y+y′,z+(−1)yrx(z′)). Then Q(n,r) is a group if and only if r2≡1(modn).
Proof. In view of Proposition 4.3, it is enough to show associativity. Now,
((x0,x1,x2)(y0,y1,y2))(z0,z1,z2)=(x0+y0,x1+y1,x2+(−1)x1rx0y2)(z0,z1,z2)=(x0+y0+z0,x1+y1+z1,x2+(−1)x1rx0y2+(−1)x1+y1rx0+y0z2)
and
(x0,x1,x2)((y0,y1,y2)(z0,z1,z2))=(x0,x1,x2)(y0+z0,y1+z1,y2+(−1)y1ry0z2)=(x0+y0+z0,x1+y1+z1,x2+(−1)x1rx0(y2+(−1)y1ry0z2))
The first and second co-ordinate are always equal. So for associativity to hold, it is required that we have
⇔⇔x2+(−1)x1rx0(y2)+(−1)x1+y1rx0+y0z2=x2+(−1)x1rx0(y2+(−1)y1ry0z2)(−1)x1rx0y2+(−1)x1+y1rx0+y0z2=(−1)x1rx0y2+(−1)x1rx0(−1)y1ry0z2(−1)x1+y1rx0+y0z2=(−1)x1rx0(−1)y1ry0z2
Since x0+y0∈Z2, this holds without any conditions except when x0=y0=1. In this case, it holds if and only if r2≡1(modn).
In view of the above discussion and Proposition 4.4, we do not consider graphs where r2≡1(modn).
As mentioned, central to the construction of the graphs is the identification of quasiassociative meta-Cayley sets. Naturally the form of these sets is dependant on r. There is no general form of these sets unless we restrict r in a particular way. It turns out that when r2≡−1(modn) we may determine a general form of the metaCayley subsets without too much difficulty, for any n. For that reason, we restrict our consideration of Q(n,r) to where r2≡−1(modn). By applying the conditions in Definition 3.15 in our context, the following lemma reveals the possible forms of the meta-Cayley subsets of Q(n,r).
Lemma 4.5. Let r∈Zn such that (n,r)=1 and r2≡−1(modn). Let Q(n,r)= Z2×f(Z2×gZn) with binary operation defined by (x,y,z)(x′,y′,z′)=(x+x′,y+ y′,z+(−1)yrx(z′)) and let U be a subset of Q(n,r). Then U is a meta-Cayley subset of Q(n,r) if and only if
(i) (0,0,0)∈/U,

(ii) (0,0,i)∈U implies (0,0,−i)∈U,
(iii) (0,1,i)∈U implies (0,1,−i)∈U,
(iv) (1,0,i)∈U implies (1,0,−i),(1,0,ri),(1,0,−ri)∈U, and
(v) (1,1,i)∈U implies (1,1,−i),(1,1,ri),(1,1,−ri)∈U.
Proof. We require that U is constructed as in Definition 3.15. Thus we require sets L0 and L1 that satisfies the conditions (a), (b) and © of Definition 3.15 .
(a) By (i), (0,0,0)∈/U.
(b) L0−1=f0−1[L0−1] which implies that L0=L0−1. Now (0,i)−1=(0,−i) and (1,i)−1=(1,i) in Z2×gZn. Therefore (0,i)∈L0 implies (0,−i)∈L0, which means that (0,0,i)∈U implies (0,0,−i)∈U.
L1−1=f1−1[L1]−1 which implies that L1=f1−1[L1]−1. Now f1−1((0,i)−1)= f1−1((0,−i))=(0,ri). Therefore (0,i)∈L1 implies (0,ri),(0,−i),(0,−ri)∈ L1. Similarly, (1,i)∈L1 implies (1,−ri),(1,−i),(1,ri)∈L1. This means that (1,0,i)∈U implies (1,0,ri),(1,0,−i),(1,0,−ri)∈U and (1,1,i)∈U implies (1,1,ri),(1,1,−i),(1,1,−ri)∈U.
© Since f0 is identity map we need only consider when a=b=1. In which case, we have f1f1[Lx]=f0[Lx]. Therefore (j,i)∈Lx implies that f1f1(j,i)= (j,−i)∈Lx. This means that (j,i)∈U implies (j,−i)∈U. In particular, (0,1,i)∈U implies (0,1,−i)∈U.
(a) corresponds to condition (i), (b) corresponds to conditions (ii),(iv) and (v), and © corresponds to condition (iii).
It is not difficult to see that for disconnected vertex-transitive graphs, each component is necessarily vertex-transitive and they are isomorphic to each other. Further, for a disconnected VTNCG, each component is itself a connected VTNCG. For this reason, in the pursuit of VTNCGs, we generally only consider the connected case.
Now that we have identified possibilities of meta-Cayley subsets in Lemma 4.5, let us discuss the nature of the adjacencies that may ensue on these graphs, given particular elements in the meta-Cayley subset. The reason why we want to discuss this matter is to better understand when our graphs are necessarily connected based on the form of the meta-Cayley sets. Also, we would like to be able to identify cycles which may exists. This in turn will assist in determining automorphisms of the graphs.
In order to facilitate the discussion about possible adjacencies, we partition V(Cay(Q(n,r),U)) into four natural sets as follows. Define
V00V10V11V01:={(0,0,i):i∈Zn}:={(1,0,i):i∈Zn}:={(1,1,i):i∈Zn}:={(0,1,i):i∈Zn}
Now, we note that we have the following admissible adjacencies in relation to this partition.
Lemma 4.6. Let Q(n,r) be as in Lemma 4.5 and let U be a meta-Cayley subset of Q(n,r). Let V(Cay(Q(n,r),U)) be partitioned as in (4.1) to (4.4). In Cay(Q(n,r),U)
(a) U contains element(s) of the form (1,0,i) if and only if
(i) every vertex in V00 is adjacent to some vertex in V10, and
(ii) every vertex in V01 is adjacent to some vertex in V11.
(b) U contains element(s) of the form (1,1,i) if and only if
(i) every vertex in V00 is adjacent to some vertex in V11, and
(ii) every vertex in V01 is adjacent to some vertex in V10.
© U contains element(s) of the form (0,1,i) if and only if
(i) every vertex in V00 is adjacent to some vertex in V01, and
(ii) every vertex in V10 is adjacent to some vertex in V11.
(d) U contains element(s) of the form (0,0,i) if and only if every vertex is adjacent to some vertex in the same set in the partition.
Proof. We present a proof for (a)(i). A similar argument applies for the rest of the lemma.
Let U contain an element (1,0,i). For every vertex (0,0,j) in V00 we have an edge [(0,0,j),(0,0,j)(1,0,i)]=[(0,0,j),(1,0,j+i)]. Thus every vertex in V00 is adjacent to some vertex V10.
If a vertex (0,0,j) in V00 is adjacent to some vertex (1,0,j+i) in V10 then there exists an element (x,y,z) in U such that [(0,0,j),(0,0,j)(x,y,z)]=[(0,0,j),(1,0,j+ i)]. We then have that (x,y,z)=(1,0,i).
Figure 4.1 illustrates points (a)(i), (b)(i), ©(i) and (d) of Lemma 4.6. The figure displays the edges involving the vertex (0,0,j) interacting with elements (0,0,i),(1,0,i),(0,1,i) and (1,1,i) from the Cayley set.

Figure 4.1: Adjacencies as a result of particular elements in U.
In view of Lemma 4.6, we have the following, which presents conditions for connectedness of Cay(Q(n,r),U) for a particular form of U. Note that U in the corollary is chosen in view of Lemma 4.5 as well.
Corollary 4.7. Let n be odd and i,j∈Zn such that (i,n)=1. Let
U={(1,0,j),(1,0,…j),(1,0,rj),(1,0,…,rj),(0,1,i),(0,1,−i)}
be a meta-Cayley subset of Q(n,r) where Q(n,r) is as in Lemma 4.5. Then Cay(Q(n, r),U) is connected.
Proof. Since (i,n)=1, the sequence 0,i,2i,3i,⋯,(n−1)i covers the numbers 0,1,2,3,⋯,(n−1). The same can be said for the sequence 0,ir,2ir,3ir,⋯,(n− 1)ir. We trace a path starting at (0,0,0) and operating with the element (0,1,i). We get (0,0,0),(0,1,i),(0,0,2i),(0,1,3i),⋯. Since n is odd, we will eventually cover n vertices to get to (0,1,0). Continuing like this, we would cover another n vertices to get back to (0,0,0). Therefore, the cycle C0=(0,0,0),(0,1,i),(0,0,2i),⋯,(0,0,0) covers all the vertices in V00 and V01. Similarly, the cycle C1=(1,0,0),(1,1,ir), (1,0,2ir),⋯,(1,0,0) covers all the vertices in V10 and V11.U contains elements of the form (1,0,j′), therefore there are vertices in V00∪V01 which are adjacent to vertices in V10∪V11. Consequently, Cay(Q,U) is connected.
Remark 4.8. If j=0, then the set U above is in fact of the form
U={(1,0,0),(0,1,i),(0,1,−i)}
Nowhere in the above proof is it required that j=0, therefore the connectedness still holds in this case.
The following propositions show that U as in Corollary 4.7 covers a range of isomorphism types of Cay(Q(n,r),U) for different U, and thus serves as a suitable Cayley set for our purposes.
Proposition 4.9. Let n be odd and i,j∈Zn. Let U be as in Corollary 4.7 and Q(n,r) be as in Lemma 4.5. Let
U′={(1,1,j),(1,1,−j),(1,1,rj),(1,1,−rj),(0,1,i),(0,1,−i)}
Then Cay(Q(n,r),U)≅Cay(Q(n,r),U′).
Proof. Define a mapping ϕ:V(Cay(Q(n,r),U))⟶V(Cay(Q(n,r),U′)) by
ϕ:(x,y,z)↦(x,y+x,z)
Note that ϕ fixes the elements in V00∪V01 and swaps the elements in V10 with the elements in V11. It is clear that ϕ is a bijection, of the
Now for any vertex (0,y,z) in V, we have the following
ϕ([(0,y,z),(0,y,z)(1,0,±j)])=ϕ([(0,y,z),(1,y,z+r0(−1)y(±j))])=[(0,y,z),(1,y+1,z+r0(−1)y(±j))]=[(0,y,z),(0,y,z)(1,1,±j))]
ϕ([(0,y,z),(0,y,z)(1,0,±rj)])=ϕ([(0,y,z),(1,y,z+r0(−1)y(±rj))])=[(0,y,z),(1,y+1,z+r0(−1)y(±rj))]=[(0,y,z),(0,y,z)(1,1,±rj))]
ϕ([(0,y,z),(0,y,z)(0,1,±i)])=ϕ([(0,y,z),(0,y+1,z+r0(−1)y(±i))])=[(0,y,z),(0,y+1,z+r0(−1)y(±i))]=[(0,y,z),(0,y,z)(0,1,±i))]
For any vertex (1,y,z) in V, we have the following
ϕ([(1,y,z),(1,y,z)(1,0,±j)])=ϕ([(1,y,z),(0,y,z+r(−1)y(±j))])=[(1,y+1,z),(0,y,z+r(−1)y(±j))]=[(1,y+1,z),(0,y,z+r(−1)y+1(±j))]=[(1,y+1,z),(1,y+1,z)(1,1,±j))]
ϕ([(1,y,z),(1,y,z)(1,0,±rj)])=ϕ([(1,y,z),(0,y,z+r(−1)y(±rj))])
=[(1,y+1,z),(0,y,z+r(−1)y(±rj))]=[(1,y+1,z),(0,y,z+r(−1)y+1(±rj))]=[(1,y+1,z),(1,y+1,z)(1,1,±rj))]
ϕ([(1,y,z),(1,y,z)(0,1,±i)])=ϕ([(1,y,z),(1,y+1,z+r(−1)y(±i))])
=[(1,y+1,z),(1,y,z+r(−1)y(±i))]=[(1,y+1,z),(1,y+1,z)(0,1,±i))]
Thus ϕ is a bijective homomorphism.
Both graphs have the same degree and vertex set. Therefore ∣E(Cay(Q(n,r),U))∣ =∣E(Cay(Q(n,r),U′))∣ and by Lemma 2.5,ϕ is an isomorphism.
UNIVERSITY of the
The following proposition allows us to simplify our consideration of U.
Proposition 4.10. Let n be odd and i,j∈Zn such that i=j=0 and (i,n)=1. Let U be as in Corollary 4.7 and Q(n,r) be as in Lemma 4.5. Let
U′={(1,0,1),(1,0,−1),(1,0,r),(1,0,−r),(0,1,1),(0,1,−1)}
Then Cay(Q(n,r),U)≅Cay(Q(n,r),U′).
Proof. Define a mapping ϕ:V(Cay(Q(n,r),U′))⟶V(Cay(Q(n,r),U)) by
ϕ:(x,y,z)↦(x,y,zi)
Since (i,n)=1 we have that ϕ is a bijection.
For any vertex (x,y,z) in V, we have the following
ϕ([(x,y,z),(x,y,z)(1,0,1)])=ϕ([(x,y,z),(x+1,y,z+rx(−1)y(1))])
ϕ([(x,y,z),(x,y,z)(1,0,−1)])ϕ([(x,y,z),(x,y,z)(1,0,r)])ϕ([(x,y,z),(x,y,z)(1,0,−r)])ϕ([(x,y,z),(x,y,z)(0,1,1)])ϕ([(x,y,z),(x,y,z)(0,1,−1)])=[(x,y,zi),(x+1,y,zi+rx(−1)y(i))]=[(x,y,zi),(x,y,zi)(1,0,i))]=ϕ([(x,y,z),(x+1,y,z+rx(−1)y(−1)])=[(x,y,zi),(x+1,y,zi+rx(−1)y(−i))]=[(x,y,zi),(x,y,zi)(1,0,−i))]=ϕ([(x,y,z),(x+1,y,z+rx(−1)y(r)])=[(x,y,zi),(x+1,y,zi+rx(−1)y(ri))]=[(x,y,zi),(x,y,zi)(1,0,ri))]=ϕ([(x,y,z),(x+1,y,z+rx(−1)y(−r)])=[(x,y,zi),(x+1,y,zi+rx(−1)y(−ri))]=[(x,y,zi),(x,y,zi)(1,0,−ri))]=ϕ([(x,y,z),(x,y+1,z+rx(−1)y(1)])=[(x,y,zi),(x,y+1,zi+rx(−1)y(i))]=[(x,y,zi),(x,y,zi)(0,1,i))] UNIVERSITY of the =ϕ([(x,y,z),(x,y+1,z+rx(−1)y(−1)])=[(x,y,zi),(x,y+1,zi+rx(−1)y(−i))]=[(x,y,zi),(x,y,zi)(0,1,−i))]
Thus ϕ is a bijective homomorphism.
Both graphs have the same degree and vertex set. Therefore ∣E(Cay(Q(n,r),U))∣ =∣E(Cay(Q(n,r),U′))∣ and by Lemma 2.5,ϕ is an isomorphism.
In view of Remark 4.8, we also have the following isomorphism which is similar to the isomorphism in Proposition 4.10.
Proposition 4.11. Let n be odd and i∈Zn such that (i,n)=1. Let U be as in Remark 4.8, Q(n,r) be as in Lemma 4.5 and
U′={(1,0,0),(0,1,1),(0,1,−1)}
Then Cay(Q(n,r),U)≅Cay(Q(n,r),U′).
Proof. Define a mapping ϕ:V(Cay(Q(n,r),U′))⟶V(Cay(Q(n,r),U)) by
ϕ:(x,y,z)↦(x,y,zi)
Since (i,n)=1 we have that ϕ is a bijection.
For any vertex (x,y,z) in V, we have the following
ϕ([(x,y,z),(x,y,z)(1,0,0)])ϕ([(x,y,z),(x,y,z)(0,1,1)])ϕ([(x,y,z),(x,y,z)(0,1,−1)])=ϕ([(x,y,z),(x+1,y,z)])=[(x,y,zi),(x+1,y,zi)]=[(x,y,zi),(x,y,zi)(1,0,0))]=ϕ([(x,y,z),(x,y+1,z+rx(−1)y(1)])=[(x,y,zi),(x,y+1,zi+rx(−1)y(i))]=[(x,y,zi),(x,y,zi)(0,1,i))]=ϕ([(x,y,z),(x,y+1,z+rx(−1)y(−1)])=[(x,y,zi),(x,y+1,zi+rx(−1)y(−i))]]=[(x,y,zi),(x,y,zi)(0,1,−i))]
Thus ϕ is a bijective homomorphism.
Both graphs have the same degree and vertex set. Therefore ∣E(Cay(Q(n,r),U))∣ =∣E(Cay(Q(n,r),U′))∣ and by Lemma 2.5,ϕ is an isomorphism.
In view of the preceding discussion, henceforth we will only consider the following two forms of U. That is,
U1={(1,0,0),(0,1,1),(0,1,−1)}
and
U2={(1,0,1),(1,0,−1),(1,0,r),(1,0,−r),(0,1,1),(0,1,−1)}
Further to this, we will also only consider Cay(Q(n,r),U) where n is odd, (n,r)=1 and r2≡−1(modn).
We present the following examples of our graphs. Figure 4.2 is the graph Cay(Q (5,2),U1) and Figure 4.3 is the graph Cay(Q(5,2),U2).

Figure 4.2: Cay(Q(5,2);U1).

Figure 4.3: Cay(Q(5,2),U2).
For brevity, we will define notations for our graphs to be used henceforth.
Definition 4.12. Let Q(n,r)=Z2×f(Z2×gZn) be a loop with binary operation (x,y,z)(x′,y′,z′)=(x+x′,y+y′,z+(−1)yrx(z′)) where n,r are integers such that r∈Zn,n is odd, (n,r)=1 and r2≡−1(modn). Let
U1={(1,0,0),(0,1,1),(0,1,−1)}
and
U2={(1,0,1),(1,0,−1),(1,0,r),(1,0,−r),(0,1,1),(0,1,−1)}
We denote the graph Cay(Q(n,r),U1) as Ω(n,r) and the graph Cay(Q(n,r),U2) as Γ(n,r).
Remark 4.13. U1 and U2 are confirmed meta-Cayley subsets of Q(n,r) so that the graphs Ω(n,r) and Γ(n,r) are meta-Cayley graphs and thus, crucially, vertextransitive.
Our classes of vertex-transitive graphs now sufficiently defined, in the following chapter we determine the automorphism groups and prove non-Cayleyness on groups.

In this chapter we begin by stating and proving Sabidussi’s theorem. We consider Ω(n,r) and conclude that these graphs are VTNCGs. We then fully determine the automorphism groups of Γ(n,r) and apply Sabidussi’s theorem, proving that these graphs are also VTNCGs.
We present the statement and proof of Sabidussi’s theorem.
Theorem 5.1. ([19]) A graph is a Cayley graph on a group if and only if the automorphism group contains a subgroup which acts regularly on the vertex set.
Proof. Let G be a group and S a Cayley set on G. Let Γ=Cay(G,S). For each g∈G we denote by λg:G⟶G the left translation
λg(x)=gx
for any x∈G. Each gx is unique in G for a given g∈G and any x∈G. Therefore, λg is a permutation of V(Γ).
Every edge in Γ is of the form [x,xs] for some x∈G and some s∈S. Taking λg of [x,xs] we get
λg([x,xs])=[λg(x),λg(xs)]=[gx,g(xs)]=[gx,(gx)s]
Thus λg is edge-preserving and λg∈ Aut Γ.
Now define the set ΛG⊂ Aut Γ as
ΛG:={λg:g∈G}
the set of all left translations. It is clear that ΛG has the same order as V(Γ). Let x,y∈V(Γ) and let g=yx−1. We then have that λg(x)=yx−1x=y. Therefore, for any x,y∈V(Γ), there exists some λg∈ΛG such that λg(x)=y so that ΛG acts regularly on V(Γ).
Lastly, as mentioned in Remark 3.8, by application of Cayley’s theorem we have that ΛG forms a group under composition.
Let Γ be a graph and let H be a subgroup of Aut Γ which acts regularly on V(Γ). Fix u∈V(Γ). Define the set Su⊂H as
Su:={σ∈H:[σ(u),u]∈E(Γ)}
Now the identity map is not contained in Su, since [u,u]∈/E(Γ). Also, for any σ∈Su, we have that
σ−1[σ(u),u]=[σ−1(σ(u)),σ−1(u)]=[u,σ−1(u)]
so that σ−1∈Su. Therefore, Su is a Cayley subset of H.
Let ΓH=Cay(H,Su). We claim that ΓH≅Γ. We fix u∈V(Γ) and define a mapping ϕ:V(ΓH)⟶V(Γ) by ϕ:h↦h(u). Suppose that h(u)=h′(u) for some h,h′∈H. Let 1H be the identity element of H. We have that
h(u)=h′(u)⇒u=h−1h′(u)⇒h−1h′=1H⇒h=h′
so that ϕ is a bijection.
For any σ∈Su,[h,hσ]∈E(ΓH). We have
ϕ([h,hσ])=[h(u),h(σ(u))]=h([u,σ(u)])∈E(Γ)
so that ϕ is a bijective homomorphism. Also, by regularity of H, every edge in E(Γ) can be written as h([u,σ(u)]) for some σ∈Su and some h∈H. We then have
ϕ−1(h([u,σ(u)]))=ϕ−1([h(u),h(σ(u))])=[u,σ(u)]∈E(ΓH)
so that ϕ−1 is a homomorphism and ϕ is an isomorphism.
Therefore ΓH≅Γ so that Γ is a Cayley graph on a group.
In Example 3.9 we presented a class of groupoid graphs with a quasi-associative Cayley set Cay(M(n,r),S), which were in fact isomorphic to the generalised Petersen graphs. The Cayley set in question was of the form S={(0,1),(0,−1),(1,0)}, which seems to resemble the form of U1={(0,1,1),(0,1,−1),(1,0,0)}. As it turns out, the graphs Ω(n,r) are in fact isomorphic to Cay(M(n,r),S). Before we present the isomorphic relation, we recall that the class of graphs Ω(n,r) is restricted to where n is odd, (n,r)=1 and r2≡−1(modn). In Cay(M(n,r),S),n is not necessarily odd.
Proposition 5.2. Let r∈Zn. If r is odd then Ω(n,r)≅Cay(M(2n,r),S). If r is even then Ω(n,r)≅Cay(M(2n,n−r),S).
Proof. Define a mapping ϕ:V(Cay(M(2n,r),S))⟶V(Ω(n,r)) by
ϕ:(x,y)↦(x,y,y)
We note that Cay(M(2n,r),S) and Cay(M(2n,n−r),S) have the same vertex set so that essentially ϕ is also a mapping from V(Cay(M(2n,n−r),S)) to V(Ω(n,r)). Since n is odd, every y modulo 2n maps uniquely to a pair (y(mod2),y(modn)) so that ϕ is a bijection.
We note that every edge in Cay(M(n,r),S) is of the form [(0,y),(0,y+1)], [(1,y),(1,y+r)] or [(0,y),(1,y)]. We split the rest of the proof into two cases.
Case 1: r is odd. We have the following.
ϕ[(0,y),(0,y+1)]ϕ[(1,y),(1,y+r)]ϕ[(0,y),(1,y)]=[(0,y,y),(0,y+1,y+1)]=[(0,y,y),(0,y,y)(0,1,±1)]=[(1,y,y),(1,y+r,y+r)]=[(1,y,y),(1,y+1,y+r)]=[(1,y,y),(1,y,y)(0,1,±1)]=[(0,y,y),(1,y,y)]=[(0,y,y),(0,y,y)(1,0,0)]
Thus ϕ is a bijective homomorphism.
Both graphs have the same degree and order of vertex set. Therefore ∣E(Cay(M (2n,r),S))∣=∣E(Ω(n,r))∣ and by Lemma 2.5Ω(n,r)≅Cay(M(2n,r),S) when r is odd.
Case 2: r is even. We have the following.
ϕ[(0,y),(0,y+1)] WES ϕ[(1,y),(1,y+(n−r))]ϕ[(0,y),(1,y)]=[(0,y,y),(0,y+1,y+1)]=[(0,y,y),(0,y,y)(0,1,±1)]=[(1,y,y),(1,y+(n−r),y+(n−r))]=[(1,y,y),(1,y+1,y−r)]=[(1,y,y),(1,y,y),(0,1,±1)]=[(0,y,y),(1,y,y)]=[(1,y,y),(1,y,y)(1,0,0)]
Thus ϕ is a bijective homomorphism.
Both graphs have the same degree and order of vertex set. Therefore ∣E(Cay(M (2n,n−r),S))∣=∣E(Ω(n,r))∣ and by Lemma 2.5Ω(n,r)≅Cay(M(2n,n−r),S) when r is even.
Remark 5.3. It is known that the generalised Petersen graph G(n,r) is isomorphic to G(n,−r)[2]. We note that r and n−r have different parity. Thus, in view of Proposition 5.4, we have
Ω(n,r)≅G(2n,r)≅G(2n,n−(n−r))≅Ω(n,n−r)≅Ω(n,−r)
if r is odd, and
Ω(n,r)≅G(2n,n−r)≅Ω(n,n−r)≅Ω(n,−r)
if r is even.
The automorphism groups of the generalised Petersen graphs were fully determined by Frucht, Graver and Watkins in [4]. In [15] it was shown that they are quasi-Cayley if and only if r2≡−1(modn). In [17] it was shown that generalised Petersen graphs are VTNCGs if and only if r2≡−1(modn). Therefore we conclude that Ω(n,r) are VTNCGs.
In view of the above discussion, our consideration of the Cayley set U1={(0,1,1), (0,1,−1),(1,0,0)} is complete.
We begin by noting the following isomorphic relation. It is similar to the isomorphic relation highlighted in Remark 5.3.
Proposition 5.4. Let r∈Zn. Then Γ(n,r)≅Γ(n,−r).
Proof. Define a mapping ϕ:V(Γ(n,r))⟶V(Γ(n,−r)) by
ϕ:(x,y,z)↦(x,y,z)
We note that the vertex sets are the same and that ϕ maps as an identity map. Therefore it is a bijection.
For any vertex (x,y,z) in V, we have the following.
ϕ([(x,y,z),(x,y,z)(1,0,1)])=ϕ([(x,y,z),(x+1,y,z+rx(−1)y(1)])=[(x,y,z),(x+1,y,z+(−r)x(−1)y(±1))]
ϕ([(x,y,z),(x,y,z)(1,0,−1)])ϕ([(x,y,z),(x,y,z)(1,0,−r)])ϕ([(x,y,z),(x,y,z)(1,0,r)])ϕ([(x,y,z),(x,y,z)(0,1,1)])=[(x,y,z),(x,y,z)(1,0,±1)]=ϕ([(x,y,z),(x+1,y,z+rx(−1)y(−1)])=[(x,y,z),(x+1,y,z+(−r)x(−1)y(±1))]=[(x,y,z),(x,y,z)(1,0,±1)]=ϕ([(x,y,z),(x+1,y,z+rx(−1)y(−r)])=[(x,y,z),(x+1,y,z+(−r)x(−1)y(±r))]=[(x,y,z),(x,y,z)(1,0,±r)]=ϕ([(x,y,z),(x+1,y,z+rx(−1)y(r)])=[(x,y,z),(x+1,y,z+(−r)x(−1)y(±r))]=[(x,y,z),(x,y,z)(1,0,±r)]=ϕ([(x,y,z),(x,y+1,z+rx(−1)y(1)])=[(x,y,z),(x,y+1,z+(−r)x(−1)y(±1))]=[(x,y,z),(x,y,z)(0,1,±1)]
ϕ([(x,y,z),(x,y,z)(0,1,−1)])=ϕ([(x,y,z),(x,y+1,z+rx(−1)y(−1)])=[(x,y,z),(x,y+1,z+(−r)x(−1)y(±1))]=[(x,y,z),(x,y,z)(0,1,±1)]
Thus ϕ is a bijective homomorphism.
Both graphs have the same degree and order of vertex set. Therefore ∣E(Γ(n,r))∣= ∣E(Γ(n,−r))∣ and by Lemma 2.5,ϕ is an isomorphism.
Our approach to determining the automorphism groups in this case will be similar to the approach taken by Frucht, Graver and Watkins in [4]. To facilitate this, we will partition E. We do this in a way which respects the vertex set partition we defined in the previous chapter. The partition will be as follows.
L:={[u,v]∈E:u∈V00,v∈V01}R:={[u,v]∈E:u∈V10,v∈V11}
M1:={[u,v]∈E:u∈V00 and v∈V10}M2:={[u,v]∈E:u∈V11 and v∈V01}
Further to this, we also look at the set
M:=M1∪M2
so that L,R and M also form a partition of E.
The edge set partitions we have defined will assist in the determination of orbits of certain subsets of the automorphism group. That is, subsets of Aut Γ(n,r) which fix setwise the sets L,R and M. The subsets are Aut Γ(n,r)L,R,M and Aut Γ(n,r)M. Determining the orbits of these particular subsets of Aut Γ(n,r) will in turn lead to the determination of Aut Γ(n,r) itself.
We begin with the following useful lemma.
Lemma 5.5. Let L,R and M be as defined in (5.1) to (5.5). If γ∈ Aut Γ(n,r) fixes any of L,R or M set-wise, then it fixes all three or fixes M and interchanges L and R.
Proof. Suppose γ fixes R set-wise. Any edge in L is incident to four edges in M and one edge in L at either end vertex. Let γ map some edge in L onto some edge in M. Then, of the five edges incident at one end, two have to be mapped to edges in R, since every edge in M is incident to two edges in R. This contradicts that R is fixed. Therefore, if R is fixed, then L and M are also fixed. Similarly, the argument holds if L is fixed.
Suppose γ fixes M set-wise. Now, the edges in L and edges in R form 2n-cycles. Thus, if L and R are not fixed or interchanged, then we will have some edge in L being incident to some edge in R, which does not occur. This completes the proof.
Our first consideration is finding Aut Γ(n,r)L,R,M, the set stabiliser of L,R and M. As mentioned in the proof of Lemma 5.5, the edges of L and R form 2n-cycles. Therefore, any automorphism in Aut Γ(n,r)L,R,M is essentially an automorphism of a 2n-cycle.
Let Γ be a graph with
V(Γ)={v0,v1,…,vn−1} and E(Γ)={[vi,vi+1]:i∈Zn}
Then Γ consists entirely of just one n-cycle. Define the following maps on V(Γ) :
ρ:vi↦vi+1 and δ:vi↦v−i
It is easy to show that ρ and δ are automorphisms of Γ. Powers of ρ are essentially rotations on Γ and powers of ρ combined with δ are essentially reflections on Γ. Let ϕ∈ Aut Γ such that ϕ(vi)=vj. Then we have ϕ(vi+1)=vj+1 or ϕ(vi+1)=vj−1. Now, we can write j as i+k for some integer k. If ϕ(vi+1)=vi+k+1 then ϕ=ρk. If ϕ(vi+1)=vi+k−1 then ϕ=ρi+kδρ−i. Therefore, any automorphism of Γ is contained in <ρ,δ>, or we can say that the automorphisms of cycles consist only of rotations and reflections.
In view of the above discussion, we define the following rotations and reflections on the 2n-cycle of L :
ρ:(x,y,z)↦(x,y+1,z+1)δ:(x,y,z)↦(x,y,−z)
Note that ρ represents a rotation on the 2n-cycle of L with ρ2n=1 and δ represents a reflection on L with δ2=1. Further to these mappings respecting the the 2n-cycle of L, we also require that they are in fact automorphisms of Γ(n,r). In this regard, we present the following lemma.
Lemma 5.6. Let L,R and M be as defined in (5.1) to (5.5). Let ρ and δ be mappings on V(Γ(n,r)) defined as in (5.6) and (5.7). Then ρ and δ are automorphisms of Γ(n,r). Moreover, ρ,δ∈ Aut Γ(n,r)L,R,M.
Proof. It is easy to see that both ρ and δ are permutations of V.
For any vertex (x,y,z) in V, we have the following
ρ([(x,y,z),(x,y,z)(1,0,1)])=ρ([(x,y,z),(x+1,y,z+rx(−1)y(1))])=[(x,y+1,z+1),(x+1,y+1,z+rx(−1)y(1)+1)]=[(x,y+1,z+1),(x+1,y+1,z+1+rx(−1)y+1(−1))]=[(x,y+1,z+1),(x,y+1,z+1)(1,0,−1))]
ρ([(x,y,z),(x,y,z)(1,0,−1)])=ρ([(x,y,z),(x+1,y,z+rx(−1)y(−1)])
=[(x,y+1,z+1),(x+1,y+1,z+rx(−1)y(−1)+1)]=[(x,y+1,z+1),(x+1,y+1,z+1+rx(−1)y+1(1))]
ρ([(x,y,z),(x,y,z)(1,0,r)])=[(x,y+1,z+1),(x,y+1,z+1)(1,0,1))]=ρ([(x,y,z),(x+1,y,z+rx(−1)y(r)])=[(x,y+1,z+1),(x+1,y+1,z+rx(−1)y(r)+1)]=[(x,y+1,z+1),(x+1,y+1,z+1+rx(−1)y+1(−r))]=[(x,y+1,z+1),(x,y+1,z+1)(1,0,−r))]
ρ([(x,y,z),(x,y,z)(1,0,−r)])=ρ([(x,y,z),(x+1,y,z+rx(−1)y(−r)])
=[(x,y+1,z+1),(x+1,y+1,z+rx(−1)y(−r)+1)]=[(x,y+1,z+1),(x+1,y+1,z+1+rx(−1)y+1(r))]=[(x,y+1,z+1),(x,y+1,z+1)(1,0,r))]
ρ([(x,y,z),(x,y,z)(0,1,1)])=ρ([(x,y,z),(x,y+1,z+rx(−1)y(1)])
=[(x,y+1,z+1),(x,y,z+rx(−1)y(1)+1)]=[(x,y+1,z+1),(x,y,z+1+rx(−1)y+1(−1))]=[(x,y+1,z+1),(x,y+1,z+1)(0,1,−1))]
ρ([(x,y,z),(x,y,z)(0,1,−1)])=ρ([(x,y,z),(x,y+1,z+rx(−1)y(−1)])
=[(x,y+1,z+1),(x,y,z+rx(−1)y(−1)+1)]=[(x,y+1,z+1),(x,y,z+1+rx(−1)y+1(1))]=[(x,y+1,z+1),(x,y+1,z+1)(0,1,1))]
so that ρ preserves edges. We also have
δ([(x,y,z),(x,y,z)(1,0,1)])=δ([(x,y,z),(x+1,y,z+rx(−1)y(1))])=[(x,y,−z),(x+1,y,−z−rx(−1)y(1))]=[(x,y,−z),(x+1,y,−z+rx(−1)y(−1))]=[(x,y,−z),(x,y,−z)(1,0,−1))]
δ([(x,y,z),(x,y,z)(1,0,−1)])=δ([(x,y,z),(x+1,y,z+rx(−1)y(−1)])
=[(x,y,−z),(x+1,y,−z−rx(−1)y(−1))]=[(x,y,−z),(x+1,y,−z+rx(−1)y(1))]=[(x,y,−z),(x,y,−z)(1,0,1))]
δ([(x,y,z),(x,y,z)(1,0,r)])=δ([(x,y,z),(x+1,y,z+rx(−1)y(r)])=[(x,y,−z),(x+1,y,−z−rx(−1)y(r))]=[(x,y,−z),(x+1,y,−z+rx(−1)y(−r))]=[(x,y,−z),(x,y,−z)(1,0,−r))]
δ([(x,y,z),(x,y,z)(1,0,−r)])δ([(x,y,z),(x,y,z)(0,1,1)])δ([(x,y,z),(x,y,z)(0,1,−1)])=δ([(x,y,z),(x+1,y,z+rx(−1)y(−r)])=[(x,y,−z),(x+1,y,−z−rx(−1)y(−r))]=[(x,y,−z),(x+1,y,−z+rx(−1)y(r))]=[(x,y,−z),(x,y,−z)(1,0,r))]=δ([(x,y,z),(x,y+1,z+rx(−1)y(1)])=[(x,y,−z),(x,y+1,−z−rx(−1)y(1))]=[(x,y,−z),(x,y+1,−z+rx(−1)y(−1))]=[(x,y,−z),(x,y,−z)(0,1,−1))]=δ([(x,y,z),(x,y+1,z+rx(−1)y(−1)])==[(x,y,−z),(x,y+1,−z−rx(−1)y(1))]=[(x,y,−z),(x,y+1,−z+rx(−1)y(−1))]=[(x,y,−z),(x,y,−z)(0,1,−1))]
so that δ preserves edges. Therefore, ρ and δ are automorphisms of Γ(n,r).
Moreover, we can see that ρ maps vertices in V00 to vertices in V01 and vice versa so that L is fixed setwise. By Lemma 5.5R and M are also fixed setwise. Also, δ fixes each set in our partition of V setwise so that naturally, R,L and M are fixed.
As it turns out, Aut Γ(n,r)L,R,M can be described entirely by ρ and δ. The following lemma proves this.
Lemma 5.7. Let L,R and M be as defined in (5.1) to (5.5). Let Aut Γ(n,r)L,R,M be the set stabiliser of L,R,M in Aut Γ(n,r), and ρ,δ be the maps defined as in (5.6) and (5.7). Then Aut Γ(n,r)L,R,M=<ρ,δ>.
Proof. Any automorphism in Aut Γ(n,r)L,R,M must preserve the 2n-cycles induced
by the edges in L and R. All the automorphisms which preserve the induced 2n-cycles are contained in <ρ,δ>. Therefore Aut Γ(n,r)L,R,M=<ρ,δ>.
Now that we have determined Aut Γ(n,r)L,R,M completely, let us now consider automorphisms in Aut Γ(n,r)M which interchange L and R. By Lemma 5.5 we will then have entirely considered Aut Γ(n,r)M.
We define another mapping as follows.
α:(x,y,z)↦(x+1,y,rz)
As we did with ρ and δ, we want to confirm that α is an automorphism of Γ(n,r).
Lemma 5.8. Let α be a mapping on V(Γ(n,r)) as defined in (5.8). Then α is an automorphism of Γ(n,r). Moreover, α∈ Aut Γ(n,r)M.
Proof. It is easy to see that α is a permutation of V since (n,r)=1.
Recall that the exponent of r is modulo 2 so that rrx is not necessarily equal to rx+1. For any vertex of the form (0,y,z) we have the following
α([(0,y,z),(0,y,z)(1,0,1)])UNWESα([(0,y,z),(0,y,z)(1,0,−1)])α([(0,y,z),(0,y,z)(1,0,r)])α([(0,y,z),(0,y,z)(1,0,−r)])=α([(0,y,z),(1,y,z+r0(−1)y(1))])=[(1,y,rz),(0,y,rz+r(−1)y(1))]=[(1,y,rz),(1,y,rz)(1,0,1))]=α([(0,y,z),(1,y,z+r0(−1)y(−1))])=[(1,y,rz),(0,y,rz+r(−1)y(−1))]=[(1,y,rz),(1,y,rz)(1,0,−1))]=α([(0,y,z),(1,y,z+r0(−1)y(r))])=[(1,y,rz),(0,y,rz+r(−1)y(r))]=[(1,y,rz),(1,y,rz)(1,0,r))]=α([(0,y,z),(1,y,z+r0(−1)y(−r))])=[(1,y,rz),(0,y,rz+r(−1)y(−r))]=[(1,y,rz),(1,y,rz)(1,0,−r))]
α([(0,y,z),(0,y,z)(0,1,1)])=α([(0,y,z),(0,y+1,z+r0(−1)y(1))])=[(1,y,rz),(1,y+1,rz+r(−1)y(1))]=[(1,y,rz),(1,y,rz)(0,1,1))]α([(0,y,z),(0,y,z)(0,1,−1)])=α([(0,y,z),(0,y+1,z+r0(−1)y(−1))])=[(1,y,rz),(1,y+1,rz+r(−1)y(−1))]=[(1,y,rz),(1,y,rz)(0,1,−1))]
For any vertex of the form (1,y,z) we have the following
α([(1,y,z),(1,y,z)(1,0,1)])=α([(1,y,z),(0,y,z+r(−1)y(1))])=[(0,y,rz),(1,y,rz+rr(−1)y(1))]=[(0,y,rz),(1,y,rz+r0(−1)y(−1))]=[(0,y,rz),(0,y,rz)(1,0,−1))]
α([(1,y,z),(1,y,z)(1,0,−1)])=α([(1,y,z),(0,y,z+r(−1)y(−1))])=[(0,y,rz),(1,y,rz+rr(−1)y(−1))]=[(0,y,rz),(1,y,rz+r0(−1)y(1))]=[(0,y,rz),(0,y,rz)(1,0,1))]
ParseError: KaTeX parse error: Expected '\right', got '&' at position 60: …, z)(1,0, r)]) &̲ =\alpha\left(\…
ParseError: KaTeX parse error: Expected '\right', got '&' at position 60: …, z)(1,0,-r)]) &̲ =\alpha\left(\…
ParseError: KaTeX parse error: Expected '\right', got '&' at position 59: …y, z)(0,1,1)]) &̲ =\alpha\left(\…
α([(1,y,z),(1,y,z)(0,1,−1)])=[(0,y,rz),(0,y+1,rz+r0(−1)y(−1))]=[(0,y,rz),(1,y,rz)(0,1,−1))]=α([(1,y,z),(1,y+1,z+r(−1)y(−1))])=[(0,y,rz),(0,y+1,rz+rr(−1)y(−1))]=[(0,y,rz),(0,y+1,rz+r0(−1)y(1))]=[(0,y,rz),(1,y,rz)(0,1,1))]
Therefore, α preserves edges.
Moreover, we can see that α maps vertices in V00 to vertices in V10 and vertices in V01 to vertices in V11. Thus, all edges in L are mapped to edges in R and vice versa. Therefore, α fixes M setwise.
Remark 5.9. We note that
and
α2(x,y,z)=α(x+1,y,rz)=α4(x,y,z)(x,y,−z)=α3(x+1,y,rz)=α2(x,y,−z) WEST =α(x+1,y,−rz)=(x,y,z)
so that we have α2=δ and α4=1.
We aim now to determine Aut Γ(n,r)M completely. First, we will need the following lemma, after which we proceed to determine Aut Γ(n,r)M.
Lemma 5.10. Let γ∈ Aut Γ(n,r)M interchange L and R. If γ(0,y,z)=(1,y′,z′) then γ(1,y,z)=(0,y′,z′).
Proof. If γ(0,y,z)=(1,y′,z′) then γ(0,y+1,z+1)=(1,y′+1,z′+r) and γ(0,y+ 1,z−1)=(1,y′+1,z′−r), or γ(0,y+1,z+1)=(1,y′+1,z′−r) and γ(0,y+1,z−1)= (1,y′+1,z′+r). Consequently, we have that γ(0,y+i,z+i)=(1,y′+i,z′+ir) or γ(0,y+i,z+i)=(1,y′+i,z′−ir). In which case, the 4 -cycle
(0,y+1,z)(0,y,z+1)(1,y,z)(0,y,z−1)
is mapped to
(1,y′+1,z′)(1,y′,z′±r)γ(1,y,z))(1,y′,z′±r)
Therefore, we must have γ(1,y,z)=(0,y′,z′).
Lemma 5.11. Let ρ,δ and α be as in (5.6),(5.7) and (5.8). Then Aut Γ(n,r)M= <ρ,α>.
Proof. Let γ∈ Aut Γ(n,r)M interchange L and R. By Lemma 5.10, we can compose γ with some power of ρ such that (1,0,0) and (0,0,0) are interchanged. We may also compose with δ such that (0,1,1) is mapped to (1,1,r). It then follows that (0,i,i) is mapped to (1,i,ir) and (1,i,i) is mapped to (0,i,ir). Thus, we have that γρkδh=α for some integers k and h. That is to say, any automorphism in Aut Γ(n,r)M can be written as a combination of powers of ρ,δ and α. Now recall that α2=δ. Therefore, we have that Aut Γ(n,r)M=<ρ,α>.
Our aim is to completely determine Aut Γ(n,r). Thus far, we have determined all automorphisms of Γ(n,r) which fix M setwise. Of course there may exist automorphisms which do not fix M. These are our next consideration. We need to identify these automorphisms if they exist. For that, we will need the following lemma.
Lemma 5.12. Γ(n,r) is edge-transitive if and only if Aut Γ(n,r)M is a proper subgroup of Aut Γ(n,r).
Proof. If Γ(n,r) is edge-transitive then there exist an automorphism in Aut Γ(n,r) which maps an edge in M to an edge L. It follows immediately that Aut Γ(n,r)M is a proper subgroup of Aut Γ(n,r).
If Aut Γ(n,r) is not edge-transitive then it has at least two edge orbits. Also, it is impossible for Aut Γ(n,r) to contain more edge orbits than Aut Γ(n,r)M. Since L∪R and M form the only two edge orbits in Aut Γ(n,r)M, they must be the only two edge orbits in Aut Γ(n,r)M. Therefore, Aut Γ(n,r) coincides with Aut Γ(n,r)M, contradicting the fact that Aut Γ(n,r)M is a proper subgroup of Aut Γ(n,r).
In view of Lemma 5.12, we naturally aim to find those cases of Γ(n,r) which are not edge-transitive. If it happens that there exists no edge-transitive graphs in our class of graphs, then our determination of the automorphism group is complete. To
facilitate our search for edge-transitive graphs we will define certain parameters as was done in [4].
Let C be a cycle in Γ(n,r). We define the following:
l(C)r(C)m(C):= number of edges in C∩L:= number of edges in C∩R:= number of edges in C∩M
Let Δ be the set of all 4 -cycles in Γ(n,r), and further define
L4R4M4:=C∈Δ∑l(C):=C∈Δ∑r(C):=C∈Δ∑m(C)
The quantities L4,R4 and M4 effectively count the number of times any edge in L,R and M appears in any 4 -cycle.
UNIVERSITY of the
The following lemma relates the quantities L4,R4 and M4 to whether Aut Γ(n,r)M is a proper subgroup of Aut Γ(n,r) or not. By Lemma 5.12, we are then able to determine edge-transitivity of our graphs by calculating the quantities L4,R4 and M4.
Lemma 5.13. Let L4,R4 and M4 be as in (5.9), (5.10) and (5.11). If Aut Γ(n,r)M= Aut Γ(n,r) then 4L4=4R4=M4.
Proof. Assume that Aut Γ(n,r)M= Aut Γ(n,r). By Lemma 5.12, Γ(n,r) is edgetransitive. Let e be an edge involved in k4-cycles. By edge-transitivity, every edge is involved in k4-cycles. Since we have 2n edges in L,2n edges in R and 8n edges in M, we have that L4=2nk,R4=2nk and M4=8nk. Therefore, 4L4=4R4=M4.
In view of Lemma 5.13, we will now count the number of 4 -cycles in Γ(n,r). Using the lemmas we have proved, we may then determine whether Aut Γ(n,r)M is a proper subgroup of Aut Γ(n,r) or not.
We distinguish between different types of 4-cycles for ease of counting. We therefore partition Δ, the set of all 4-cycles in Γ(n,r), as follows:
A1A2B1B2D1D2E:={C∈Δ:∣C∩M1∣=4}:={C∈Δ:∣C∩M2∣=4}:={C∈Δ:∣C∩M1∣=2 and ∣C∩R∣=2}:={C∈Δ:∣C∩M2∣=2 and ∣C∩R∣=2}:={C∈Δ:∣C∩M1∣=2 and ∣C∩L∣=2}:={C∈Δ:∣C∩M2∣=2 and ∣C∩L∣=2}:={C∈Δ:∣C∩M∣=2 and ∣C∩L∣=1 and ∣C∩R∣=1}
We also define the sets A,B and D as:
ABD:=A1∪A2:=B1∪B2:=D1∪D2
so that A,B,D and E form a partition of Δ.
The following lemma counts the number of 4-cycles in Γ(n,r) and calculates the quantities L4,R4 and M4 for each n.
UNIVERSITY of the
Lemma 5.14. Let L4,R4 and M4 be as in (5.9), (5.10) and (5.11). Then 4R4= 4L4=M4 in Γ(n,r) for any n.
Proof. Let A1,A2,B1,B2,D1,D2,E,A,B and D be as in (5.12) to (5.21). The vertex (0,0,z) in V00 is involved in the following four 4-cycles in A1 :
The second and fourth vertices in the above 4-cycles cover all four of the vertices adjacent to (0,0,z) in V10. Only if the third co-ordinate in any of the third vertices above equals an element in {z−2,z−2r,z+2,z+2r} does there exist another
4-cycle in A1 involving (0,0,z). We solve the following equations to find possible instances where such exceptions exist. By considering parities, it is only these eight equations that we need to consider:
(i) 2=−r−1⇒−r=3⇒−1=9⇒n=5;
(ii) 2=r−1⇒r=3⇒−1=9⇒n=5;
(iii) 2=−r+1⇒r=−1, which is impossible;
(iv) 2=r+1⇒r=1, which is impossible;
(v) 2r=−r−1⇒3r=1⇒−9=1⇒n=5;
(vi) 2r=r−1⇒r=−1, which is impossible;
(vii) 2r=−r+1⇒3r=1⇒−9=1⇒n=5;
(viii) 2r=r+1⇒r=1, which is impossible.
Thus the only exceptional case is when n=5. For now, we consider only n>5.
If each vertex in V00 is involved in four 4 -cycles in A1 then we have 4n4-cycles in A1. However, in the 4n we would have counted each cycle twice since each (0,0,z) will appear again as the third vertex in the consideration of some other (0,0,z′). Thus, we have 2n4-cycles in A1. It is clear that the order of A1 equals the order of A2, so that the order of A is 4n.
(0,0,z) is involved in only one cycle in B1 :
so that the order of B1 is n. It is easy to see that the order of B1 equals the order of B2, so that the order of B is 2n. Similarly, the order of D is 2n.
(0,0,z) is involved in eight 4 -cycles in E :
2) (0,0,z)(0,1,z−1)(1,1,z)(1,0,z+r);
3) (0,0,z)(0,1,z−1)(1,1,z)(1,0,z−r);
Similar to cycles in A, we determine possible exceptional cases. In this case, an exception will occur if an element of {z−2,z−2r,z+2,z+2r} equals an element of {z−r−1,z−1+r,z+1−r,z+r+1,z}. This is the same as before except that we now need to consider when an element of {z−2,z−2r,z+2,z+2r} equals z. Clearly, this is impossible. Thus we have that the order of E is 8n.
Table 5.1 is a presentation of L4,R4 and M4 for A,B,D and E in Γ(n,r) when n>5.
| Set | 4 -cycles | L4 | R4 | M4 |
|---|---|---|---|---|
| A | 4 n | 0 | 0 | 16 n |
| B | 2 n ERS | 0 | 4 n | 4 n |
| D | 2 n ER | 4 n | 0 | 4 n |
| E | 8 n | 8 n | 8 n | 16 n |
| All | 16 n | 12 n | 12 n | 40 n |
Table 5.1: Edge-counts in Γ(n,r) for n>5.
Let us now consider the case n=5. If n=5 then we can have r=2 or r=3. However, by Proposition 5.4 we have that Γ(5,2)≅Γ(5,3). Thus we need only consider when r=2.
We observe that each ∣Vxy∣=5. We count the 4 -cycles in A. Each vertex (x,y,i) is adjacent to four out of five vertices in V(x+1)y. Without loss of generality, we consider the vertex (0,0,0) and count the 4 -cycles in A which (0,0,0) is involved in. Starting at (0,0,0) we have four choices for the second vertex (1,0,z1). We then have three choices for the third vertex (0,0,z2) since we cannot trace back to (0,0,0) or (0,0,z2). For the fourth vertex we cannot trace back to (1,0,0),(1,0,z1) or (1,0,z2)
so that we have two choices for the fourth vertex (1,0,z3). Therefore, taking double counting into account, (0,0,0) is involved in 24×3×2=12 type A4-cycles. The order of A is then 12×10=120.
We now count 4 -cycles in B and D. Again we consider (0,0,0). There are exactly three vertices in V11 which have in common with (0,0,0) two incident vertices in V01. Similiarly, the same applies for V10. Therefore, (0,0,0) is involved in three 4 -cycles in B and three in D. By similar arguments, the order of B and D equals 220×3=30.
Considering now type E4-cycles. There exist two paths from (0,0,0) to (1,1,0) via V10 and two via V01, so that we have four 4 -cycles in E involving both (0,0,0) and (1,1,0). Similarly, we have two 4 -cycles in E involving (0,0,0) and (1,1,1), two involving (0,0,0) and (1,1,2), two involving (0,0,0) and (1,1,3), and two involving (0,0,0) and (1,1,4). In total then, we have 12 involving (0,0,0), so that we have 12×5=60 type E4-cycles in total. We summarise in Table 5.2.

By table 5.1 we can see that 4L4=4R4=M4 for any n=5. By table 5.2 we can see that 4L4=4R4=M4 for n=5. Therefore 4L4=4R4=M4 for any n.
The following theorem completes our consideration of the automorphism groups.
Theorem 5.15. Let ρ and α be as in (5.6) and (5.8). Then Aut Γ(n,r)=<ρ,α> for any n.
Proof. By Lemma 5.14 we have that 4L4=4R4=M4 in Γ(n,r) for any n. By Lemma 5.13 we have that Aut Γ(n,r)M= Aut Γ(n,r). By Lemma 5.11 Aut Γ(n,r)=< ρ,α>.
Having completely determined the automorphism groups of Γ(n,r), applying Sabidussi’s theorem [19] proves to be a relatively simple matter.
Theorem 5.16. Γ(n,r) is a VTNCG.
Proof. It suffices to show non-Cayleyness on groups. By Theorem 5.1, we require a subgroup of Aut Γ(n,r) of order 4n which acts transitively on V(Γ(n,r)) for Cayleyness on groups.
Since ρ fixes V00∪V01 and V10∪V11,<ρ> is not transitive. Thus, it is clear that any transitive subgroup of Aut Γ(n,r)=<ρ,α> must contain a subgroup of <α>. Since α4=1 and α2 fixes V00∪V01 and V10∪V11 as well, the only subgroup which suffices is <α> itself.
Now, ∣<α>∣=4 and the required subgroup must have order 4n. Also, no power of ρ is equal to any power of α except that α4=ρ2n=1. We must therefore include a subgroup of <ρ> of order n. The only possibility is <ρ2>. In which case the vertex (0,0,z) cannot be mapped to any vertex (0,1,z′). Therefore, there exists no subgroup of Aut Γ(n,r) which acts regularly on V(Γ(n,r)).
It is expected that there exists many variations of U such that Cay(Q(n,r),U) is a VTNCG. More generally, there are indications that determining meta-Cayley graphs on a semi-direct product of groups is a fruitful avenue in finding vertex transitive graphs which are non-Cayley on groups.
UNIVERSITY of the
WESTERN CAPE
[1] B. Alspach, The Classification of Hamiltonian Generalized Petersen Graphs, J. Combin. Theory Ser B, 34 (1983), 293-312.
[2] B. Alspach and T. D. Parsons, A construction for vertex transitive graphs, Canad. J. Math., 34 (1982), 307-318.
[3] R. Balakrishnan and K. Ranganathan, A textbook of graph theory, Springer, New York, 1999.
[4] R. Frucht, J. E. Graver and M. E. Watkins, The groups of the generalized Petersen graphs, Math. Proc. Cambridge Philos. Soc., 70 (1971), 211-218.
[5] G. Gauyacq, On quasi-Cayley graphs, Discrete Appl. Math., 77 (1997), 43-58.
[6] C. D. Godsil, More odd graph theory, Discrete Math, 32 (1980), 205-217.
[7] A. A. Ivanov and C. E. Praeger, Problem Session at ALCOM-91, European J. Combin., 15 (1994), 105-112.
[8] W. M. Kantor, Primitive permutation groups of odd degree with an application to projective planes, J. Algebra, 106 (1987), 15-45.
[9] D. Marušič, Cayley properties of vertex symmetric graphs, Ars Combin., 16B (1983), 297-302.
[10] D. Marušič and R. Scapellato, Characterising vertex-transitive pq-graphs with an imprimitive automorphism group, J. Graph Theory, 16 (1992), 375-387.
[11] D. Marušič and R. Scapellato, Imprimitive representations of SL(2,2k), J. Combin. Theory (B), 58 (1993), 46-57.
[12] G. A. Miller, Automorphisms of the Dihedral Groups, Proc. Nat. Americ. C, 28:9 (1942), 368-371.
[13] E. Mwambene, Representing Graphs on Groupoids: Symmetry and Form, PhD Thesis, University of Vienna, 2001.
[14] E. Mwambene, Representing vertex-transitive graphs on groupoids, Quaest. Math., 29:3 (2009), 279-284.
[15] E. Mwambene, Cayley graphs on left quasi-groups and groupoids representing kdimensional generalised Petersen graphs, Discrete Math., 309 (2009), 2544-2547.
[16] E. Mwambene, On non-Cayley vertex-transitive graphs and the meta-Cayley graphs, Quaest. Math., 34:4 (2011), 425-431.
[17] R. Nedela, M. Škoviera, Which generalised Petersen graphs are Cayley? J. Graph Theory, 19 (1995), 1-11.
[18] C. E. Praeger, M. Y. Xu, Vertex-transitive graphs of order a product of two distinct primes, J. Combin. Theory (B), 59 (1993), 245-266.
[19] G. Sabidussi, On a class of fixed-point-free graphs, Proc. Amer. Math. Soc., 9:5 (1958), 800-804.
[20] M. E. Watkins, Vertex-transitive graphs that are not Cayley graphs, in: Cycles and Rays, (G. Hahn et al. (eds.), Kluwer, Netherlands, 1990), 243-256.
Graphs and Combinatorics, 2019
In this paper, we define meta-Cayley graphs on dihedral groups. We fully determine the automorphism groups of the constructed graphs in question. Further, we prove that some of the graphs that we have constructed do not admit subgroups which act regularly on their vertex set; thus proving that they cannot be represented as Cayley graphs on groups.
Periodica Mathematica Hungarica, 1976
It is well-knot~n tha~ its automorphism group A(X o H) must contain the regular subgroup L G corresponding to the set of left multiplication~ by elements of G. This paper is concerned with minimizing the index [A(Xo, t/):L a] for given G, in particular when this index is always greater than 1. If G is a.beli~n but not one of seven exceptional groups, then a Cayley graph of G exists for which this index is at most 2. Nearly complete results for the generalized dicyclic groups are also obtained.
Journal of Combinatorial Theory, Series B, 2020
A graph Γ admitting a group H of automorphisms acting semi-regularly on the vertices with exactly two orbits is called a bi-Cayley graph over H. Such a graph Γ is called normal if H is normal in the full automorphism group of Γ, and normal edge-transitive if the normaliser of H in the full automorphism group of Γ is transitive on the edges of Γ. In this paper, we give a characterisation of normal edgetransitive bi-Cayley graphs, and in particular, we give a detailed description of 2-arc-transitive normal bi-Cayley graphs. Using this, we investigate three classes of bi-Cayley graphs, namely those over abelian groups, dihedral groups and metacyclic p-groups. We find that under certain conditions, 'normal edgetransitive' is the same as 'normal' for graphs in these three classes. As a by-product, we obtain a complete classification of all connected trivalent edge-transitive graphs of girth at most 6, and answer some open questions from the literature about 2-arc-transitive, half-arc-transitive and semisymmetric graphs.
ISRN Algebra, 2011
A Cayley graph of a finite group is called normal edge transitive if its automorphism group has a subgroup which both normalizes and acts transitively on edges. In this paper we determine all cubic, connected, and undirected edge-transitive Cayley graphs of dihedral groups, which are not normal edge transitive. This is a partial answer to the question of Praeger (1999).
Discrete Mathematics, 2010
In this paper, we first give a characterization of Cayley graphs of rectangular groups. Then, vertex transitivity of Cayley graphs of rectangular groups is considered. Further, it is shown that Cayley graphs Cay(S, C) which are automorphism-vertex transitive, are in fact Cayley graphs of rectangular groups, if the subsemigroup generated by C is an orthodox semigroup. Finally, a characterization of vertex transitive graphs which are Cayley graphs of finite semigroups is concluded.
Bulletin of the Australian Mathematical Society, 1999
An approach to analysing the family of Cayley graphs for a finite group G is given which identifies normal edge-transitive Cayley graphs as a sub-family of central importance. These are the Cayley graphs for G for which a subgroup of automorphisms exists which both normalises G and acts transitively on edges. It is shown that, for a nontrivial group G, each normal edge-transitive Cayley graph for G has at least one homomorphic image which is a normal edge-transitive Cayley graph for a characteristically simple quotient group of G. Moreover, given a normal edge-transitive Cayley graph ΓH for a quotient group G/H, necessary and sufficient conditions are obtained for the existence of a normal edge-transitive Cayley graph Γ for G which has ΓH as a homomorphic image, and a method for obtaining all such graphs Γ is given.
European Journal of Combinatorics, 2003
We investigate Cayley graphs of semigroups and show that they sometimes enjoy properties analogous to those of the Cayley graphs of groups.
Discussiones Mathematicae Graph Theory, 2006
Let G be a finite group, and let 1 G ∈ S ⊆ G. A Cayley di-graph Γ = Cay(G, S) of G relative to S is a di-graph with a vertex set G such that, for x, y ∈ G, the pair (x, y) is an arc if and only if yx −1 ∈ S. Further, if S = S −1 := {s −1 |s ∈ S}, then Γ is undirected. Γ is conected if and only if G = s. A Cayley (di)graph Γ = Cay(G, S) is called normal if the right regular representation of G is a normal subgroup of the automorphism group of Γ. A graph Γ is said to be arc-transitive, if Aut(Γ) is transitive on an arc set. Also, a graph Γ is s-regular if Aut(Γ) acts regularly on the set of s-arcs. In this paper, we first give a complete classification for arc-transitive Cayley graphs of valency five on finite Abelian groups. Moreover, we classify s-regular Cayley graph with valency five on an abelian group for each s ≥ 1.
The present work is devoted to characterize the family of symmetric undirected Cayley graphs over finite Abelian groups for degrees 4 and 6. arXiv:1403.5440v1 [math.CO] From here onwards, all matrices will be considered to be non-singular, unless the contrary is stated. Note that, since Z n /M Z n has | det(M )| elements, this will be the number of nodes of Cay(Z n /M Z n ; ±B n ). Moreover, since any vertex v is adjacent to v ± e i (mod M ), Cay(Z n /M Z n ; ±B n ) is, in general, a regular graph of degree 2n, that is, any node has 2n different neighbours. Then, we call n the dimension of the graph. Note that when e i ≡ ±e j (mod M ) or 2e i ≡ 0 (mod M ) for some 1 ≤ i, j ≤ n then the degree of the Cayley graph is less than 2n. In that case we can also consider the corresponding multigraph, which always has degree 2n. The hypercube could be considered as an extreme case since ∀i ∈ {1, . . . , n}, 2e i ≡ 0 (mod M ) and therefore it has degree n.
Journal of Graph Theory, 1996
The Petersen graph on 10 vertices is the smallest example of a vertextransitive graph which is not a Cayley graph. In 1983, D. Marušič asked: for what values of n does there exist such a graph on n vertices? We give several new constructions of families of vertex-transitive graphs which are not Cayley graphs and complete the proof that, if n is divisible by p 2 for some prime p, then there is a vertex-transitive graph on n vertices which is not a Cayley graph unless n is p 2 , p 3 , or 12.