 Jean-Clair Poncet
Jean-Clair Poncet580 California St., Suite 400
San Francisco, CA, 94104
Academia.edu no longer supports Internet Explorer.
To browse Academia.edu and the wider internet faster and more securely, please take a few seconds to upgrade your browser.
AI
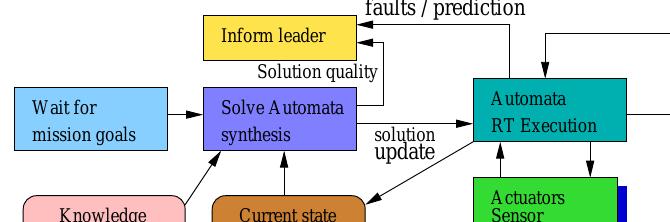
Unmanned vehicles face complexities in autonomous command and control, particularly in hostile environments with limited communication. These challenges necessitate a system of multi-level planning to manage spacecraft formations effectively. This approach leverages Multi-Agent Systems (MAS) and non-deterministic constraint-based automata to enhance adaptability and efficiency in mission execution, allowing for the management of both long-term planning and short-term operations. The proposed solution addresses the combinatorial challenges and resource limitations prevalent in current spacecraft systems.




2002
The New Millennium Remote Agent (NMRA) vSll be the first AI system to control an actual spacecraft. The spacecraft domain raises a number of challenges for planning and execution, ranging from extended agency and long-term planning to dynamic recoveries and robust concurrent execution, all in the presence of tight real-time deadlines, changing goals, scarce resource constraints, and a v-ide variety of possible failures. We believe NMRA is the first system to integrate closed-loop planning and e.xecution of concurrent temporal plans, and the first autonomous system that v-ill be able to achieve a sustained multi-stage multiyear mission v-ithout communication or guidance from earth.
1996
NASA has recently announced the New Millennium Program (NMP) to develop \faster, better, cheaper" spacecraft in order to establish a \virtual presence" in space. A crucial element in achieving this vision is onboard spacecraft autonomy, requiring us to automate functions which have traditionally been achieved on ground by humans. These include planning activities, sequencing spacecraft actions, tracking spacecraft state, ensuring correct functioning, recovering in cases of failure and recon guring hardware. In response to these challenging requirements, we analyzed the spacecraft domain to determine its unique properties and developed an architecture which provided the required functionality. This architecture integrates traditional real-time monitoring and control with constraint-based planning and scheduling, robust multi-threaded execution, and model-based diagnosis and recon guration. In a ve month e ort we successfully demonstrated this implemented architecture in the context of an autonomous insertion of a simulated spacecraft into orbit around Saturn, trading o science and engineering goals, and achieving the mission goals in the face of any single point of hardware failure. This scenario turned out to be among the most complex handled by each of the component technologies. As a result of this success, the integrated architecture has been selected to control the rst NMP ight, Deep Space One, in 1998. It will be the rst AI system to autonomously control an actual spacecraft.
NASA STI/Recon Technical Report N, 2003
In addition to traditional fault detection and recovery, the algorithms must be robust to fleet-level faults, loss of shared information, communication latency, relative control and estimation, and collisions. • The computation, information management and communication must be well distributed. • Robust distributed autonomous GN&C algorithms are required. The flight software must be flexible and easy to adapt, such as allowing the software blocks to be dynamically loaded.
The Deep Space One (DS1) mission, scheduled to fly in 1998, will be the first spacecraft to feature an on-board planner. The planner is part of an artificial intelligence based control architecture that comprises a planner/scheduler, a plan execution engine, and a model-based fault diagnosis and reconfiguration engine. This autonomy architecture reduces mission costs and increases mission quality by enabling highlevel commanding, robust fault responses, and opportunistic responses to serendipitous events. This paper describes the on-board planning and scheduling component of the DS1 autonomy architecture.
1997
This paper describes the New Millennium Remote Agent (NMRA) architecture for autonomous spacecraft control systems. This architecture integrates traditional real-time monitoring and control with constraintbased planning and scheduling, robust multi-threaded execution, and model-based diagnosis and reconguration. We implemented a prototype autonomous spacecraft agent within the architecture and demonstrated the prototype in the context of a challenging autonomous mission scenario on a simulated spacecraft. As a result of this success, the integrated architecture has been selected to control Deep Space One (DS-1), the rst ight of NASA's New Millennium Program (NMP), which will launch in 1998. It will be the rst AI system to autonomously control an actual spacecraft.
IEEE Aerospace and Electronic Systems Magazine, 2009
An autonomous spacecraft must balance longterm and short-term considerations. It must perform purposeful activities that ensure long-term science and engineering goals are achieved and ensure that it maintains positive resource margins. This requires planning in advance to avoid a series of shortsighted decisions that can lead to failure. However, it must also respond in a timely fashion to a somewhat dynamic and unpredictable environment. In terms of high-level, goal-oriented activity, spacecraft plans must often be modified in the event of fortuitous events such as observations completing early and setbacks such as failure to acquire a guidestar for a science observation. This paper describes an integrated planning and execution architecture that supports continuous modification and updating of a current working plan in light of changing operating context.
ArXiv, 2021
Onboard autonomy technologies such as planning and scheduling, identification of scientific targets, and content-based data summarization, will lead to exciting new space science missions. However, the challenge of operating missions with such onboard autonomous capabilities has not been studied to a level of detail sufficient for consideration in mission concepts. These autonomy capabilities will require changes to current operations processes, practices, and tools. We have developed a case study to assess the changes needed to enable operators and scientists to operate an autonomous spacecraft by facilitating a common model between the ground personnel and the onboard algorithms. We assess the new operations tools and workflows necessary to enable operators and scientists to convey their desired intent to the spacecraft, and to be able to reconstruct and explain the decisions made onboard and the state of the spacecraft. Mock-ups of these tools were used in a user study to underst...
IEEE Intelligent Systems, 1998
Space Sciencecraft Control and Tracking in the New Millennium, 1996
NASA has recently announced the New Millennium Program NMP to develop faster, better, cheaper" spacecraft in order to establish a virtual presence" in space. A crucial element i n a c hieving this vision is onboard spacecraft autonomy, requiring us to automate functions which h a v e traditionally been achieved on ground by humans. These include planning activities, sequencing spacecraft actions, tracking spacecraft state, ensuring correct functioning, recovering in cases of failure and recon guring hardware. In response to these challenging requirements, we analyzed the spacecraft domain to determine its unique properties and developed an architecture which provided the required functionality. This architecture integrates traditional real-time monitoring and control with constraint-based planning and scheduling, robust multi-threaded execution, and model-based diagnosis and recon guration. In a ve month e ort we successfully demonstrated this implemented architecture in the context of an autonomous insertion of a simulated spacecraft into orbit around Saturn, trading o science and engineering goals, and achieving the mission goals in the face of any single point of hardware failure. This scenario turned out to be among the most complex handled by each of the component technologies. As a result of this success, the integrated architecture has been selected to control the rst NMP ight, Deep Space One, in 1998. It will be the rst AI system to autonomously control an actual spacecraft.

Loading Preview
Sorry, preview is currently unavailable. You can download the paper by clicking the button above.
In this paper, we propose a stratified agent architecture for an autonomous earth imaging spacecraft to achieve higher levels of autonomy. The autonomous spacecraft should possess the self-adaptation and the self-healing capabilities, in addition to other fundamental autonomy requirements including reflex, awareness and self-regulation. The architecture is configured as stratified agent architecture with two strata. The upper stratum is concerned with the adaptive behaviour, which is achieved through an on-board mission planner. This stratum is in turn configured as hierarchical agent architecture. Hierarchical planning in a Petri net framework involves refinement of a transition in the upper layer using a Petri net model and searching for a valid plan using the reachability analysis technique. The lower stratum deals with the execution aspects and provides the reactive behaviour. It is configured with three peer level agents to achieve the reflex and the awareness properties. These agents follow a generic structure with perception, action, and communication components. The agent achieves the required autonomy capabilities by using an appropriate knowledge model. The uniqueness of the architecture is the utilisation of Petri net models, with varying degree of abstraction, in the various layers to represent the planning knowledge, diagnostic knowledge and the appropriate world model. In this paper, we present how the various capabilities for autonomy are achieved by the agent organisation by exploiting the Petri net models.
A complex system of spacecraft and ground tracking stations, as well as a constellation of satellites or spacecraft, has to be able to reliably withstand sudden environment changes, resource fluctuations, dynamic resource configuration, limited communication bandwidth, etc., while maintaining the consistency of the system as a whole. It is not known in advance when a change in the environment might occur or when a particular exchange will happen. A higher degree of sophistication for the communication mechanisms between different parts of the system is required. The actual behavior has to be determined while the system is performing and the course of action can be decided at the individual level. Under such circumstances, the solution will highly benefit from increased on-board and on the ground adaptability and autonomy. An evolvable architecture based on intelligent agents that communicate and cooperate with each other can offer advantages in this direction. This paper presents an architecture of an evolvable agent-based system (software and softwarehardware hybrids) as well as some plans for further implementation.
Telematics and Informatics, 1992
This paper presents a description of UNICORN, a prototype system developed at General Electric for the purpose of investigating Artificial Intelligence (AI) concepts supporting spacecraft autonomy. With this objective, UNICORN employs thematic reasoning, of the type first described by Rodger Schank of Northwestern University, to allow the context-sensitive control of multiple intelligent agents within a blackboard-based environment (Schank, 1977). In its domain of application, UNICORN demonstrates the ability to reason teleologically with focused knowledge. Also presented within the following sections are some of the lessons learned as a result of this effort. These lessons apply to any effort wherein system level autonomy is the objective.
The paper presents a possible approach to the planning-scheduling to be faced by a space system formation to accomplish specific mission goals with limited on-board resources. A multi-agent architecture is here selected to cope with flexibility and reliability requirements typical for a system that must be operative in a hostile and not completely known environment such the space environment is. A distributed versus a central architecture is here preferred, and the communication protocol and negotiation mechanisms are investigated. The CSP problem is solved both by applying to the STN scheme a Shortest Path algorithm and a Maximum Weighted Cliques technique for the resources management. The applicative scenario here proposed consists of an Earth spacecraft formation devoted to accomplish both single and globally shared activities by exploiting both local and global resources. Reconfiguration maneuvers are included, to be accomplished by an electric propulsion module. That kind of operations make the set of temporal constraints to be satisfied by the final schedule more complex as the search mechanism has to cope with a nested optimal control problem. A dedicated light and fast algorithm to solve the control problem for the reconfiguration maneuvers has been developed. Preliminary results according to the formation flying application are discussed.
NASA Monographs in Systems and Software Engineering, 2010
SpaceOps 2002 Conference, 2002
Multi-spacecraft missions such as constellations and formation flying present new challenges in terms of operational complexity. Although significant cost savings are likely to be realized because the individual spacecraft are simpler and can be produced on an "assembly line", the overall complexity of operating mission assets will be greater. Distributed control, based on a reactive, goal-based onboard autonomy solution, offers a way to moderate such complexity from an operational point of view and maintain a high level of fault tolerance for individual spacecraft and for the mission as a whole. Operational simplicity for multi-spacecraft missions will involve shifting responsibility from human operators to automated or autonomous systems. The on-board autonomy architecture proposed here is based on a reactive system (specified as a hierarchy of goal decompositions) deployed on each spacecraft in the mission. The system is reactive in that it is sensitive to changes in local and global state and modifies its behavior in real-time. The top level goals of the system correspond to the main objectives of the mission and of individual spacecraft and represent conditions or states that a spacecraft is supposed to achieve or maintain. Goals within the system are hierarchically decomposed into simpler subgoals until the subgoals are simple enough to execute directly. The distributed control architecture uses a fault tolerance solution implemented on the goal decomposition hierarchy in order to coordinate the activity of spacecraft within the formation. High level goals corresponding to global mission requirements, i.e., requirements for the formation, have decompositions in the hierarchy that specify how the individual spacecraft can address the requirements. If a spacecraft experiences a fault and becomes unable to satisfy a global mission requirement, it can broadcast this information to its peers and initiate recovery steps. Similarly if the spacecraft commits to a mission requirement (due to a fault elsewhere in the formation), it can broadcast this decision. Using the same techniques distributed control can deal with the retirement and addition of spacecraft. The distributed control approach discussed here is based on explicit models of mission requirements, local spacecraft resources (available or faulty) and how resources are allocated to requirements. Due to increased fault tolerance, i.e., ability to react to and accommodate small changes in the fault status of mission resources, the effect on mission operations should be reduced unscheduled downtime, reduced frequency of "emergencies" and, thus, reduced staffing requirements. Operations shifts to a monitoring role, i.e., tracking the current allocation of resources, approving continuation of the system generated fault recovery or commanding an alternative.
1 -this vast amount of knowledge is partly ignored by scientists other than theoreticians in computer science; 2 -some of the solutions that are available match some essential problems raised with autonomous systems.